Ürün Açıklaması #
RevPi MIO, Revolution Pi ürün ailesinin bir genişleme modülü olup 8 analog giriş, 8 analog çıkış ve yazılım aracılığıyla dijital giriş veya dijital çıkış olarak yapılandırılabilen 4 dijital kanala sahiptir.
Bileşenler #
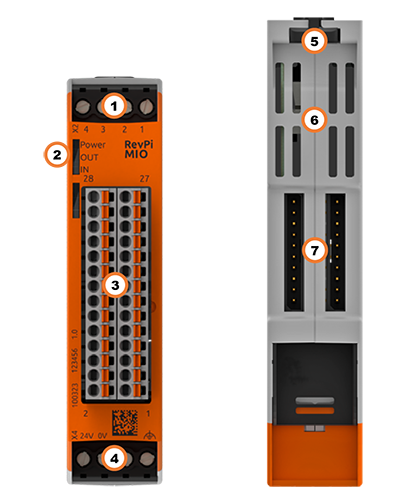
| Pozisyon | Bileşen | Uygulama |
|---|---|---|
1 |
X2 konnektörü |
|
2 |
3 × durum LED'i |
|
3 |
8 × analog giriş |
|
4 |
X4 konnektörü |
|
5 |
Kilitli kelepçeler |
|
6 |
Havalandırma Yuvaları |
|
7 |
2 × PiBridge |
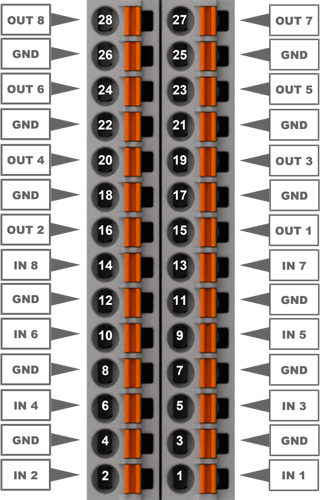
Pinout #
RevPi MIO'da
-
4 adet aynı şekilde atanmış dijital bağlantıya (giriş veya çıkış) sahip bir GPIO arayüzü
-
Voltaj için 8 analog giriş
-
Voltaj için 8 analog çıkış
Analog giriş ve çıkışlar için konnektördeki pinler aşağıdaki gibi atanır:
Yapılandırma için PiCtory Value Editor'de RevPi MIO'yu Yapılandırma bölümüne bakın.
LED'ler #
LED'ler farklı cihaz durumlarını gösterir.
Güç
| Sinyal | Fonksiyon |
|---|---|
Yeşil |
RevPi temel modülüne bağlantı kuruldu. |
Kırmızı yanıp sönüyor |
RevPi temel modülüne bağlantı kuruluyor (başlatma aşaması). |
Kırmızı |
RevPi taban modülüne bağlantı kesildi. |
OUT
| Sinyal | Fonksiyon |
|---|---|
Kırmızı yanıp sönüyor |
Bir veya daha fazla analog çıkışa 10,5 V'un üzerinde bir voltaj ayarlanır. |
IN
| Sinyal | Fonksiyon |
|---|---|
Yeşil |
Bir veya daha fazla analog giriş kullanılıyor. |
Kırmızı yanıp sönüyor |
Girişlerden birindeki gerilim, tanımlanan 10 V değerini aşıyor. |
Uyumlu Temel Modüller #
-
RevPi Connect 5
-
RevPi Connect 4
-
RevPi Connect SE (sadece sol taraf)
-
RevPi Connect+ (sadece sol taraf)
-
RevPi Connect S (sadece sol taraf)
-
RevPi Core (tüm varyantlar)
Teslimat Kapsamı #
Teslimat kapsamı şunları içerir:
-
RevPi genişletme modülü
-
PiBridge fiş konnektörü
-
X2 konnektörü
-
X4 konnektörü
-
2 × 14 kutuplu I/O konnektörü
-
Ek
Montaj ve Bağlantı #
RevPi, bir kontrol kabininde kullanılmak üzere geliştirilmiştir. Amaçlanan Kullanım ve tüm Güvenlik Talimatları'na uyun.
|
Uyarı
|
Elektrik çarpması nedeniyle hayati tehlike
230 V şebeke gerilimine sahip şalt dolabındaki cihazlar üzerinde çalışılması durumunda ölümcül elektrik çarpması riski vardır. ▷ Şalt dolabındaki işlemler yalnızca kalifiye elektrikçiler tarafından yapılmalıdır. ▷ Şalt dolabında herhangi bir işlem yapmadan önce, güç kaynağını uygun şekilde kapatın. |
Kurulum ve bağlantıyı aşağıdaki sırayla gerçekleştirin:
-
RevPi temel modülünü ve tüm genişletme modüllerini bir DIN Rayına monte edin.
-
Tüm genişletme modüllerini PiBridge fiş konnektörü aracılığıyla bağlayın.
- #
Sensörler ve aktüatörler gibi diğer tüm cihazları bağlayın. Bunun için kullanabileceğiniz arayüzleri Bileşenler bölümünde bulabilirsiniz.
-
Son adım olarak güç kaynağını bağlayın
Yapılandırma #
RevPi genişletme modülleri System Configuration with PiCtory aracılığıyla yapılandırılır.
PiCtory'de RevPi MIO'yu yapılandırma #
RevPi MIO'da şunlar bulunur:
-
4 adet aynı şekilde atanmış dijital bağlantıya (giriş veya çıkış) sahip bir GPIO arayüzü
-
Voltaj için 8 analog giriş
-
Voltaj için 8 analog çıkış
Bunlar PiCtory's Value Editor'ünde yapılandırılabilir.
Pinout'a dikkat edin Pinout.
▷ Device Catalog > I/O Devices 'ndan RevPi MIO'yu Yapılandırma Kartı'ndaki Revolution Pi sistemindeki doğru yuvaya takın.
▷ Gerekirse Device Data altında RevPi MIO'nun temel yapılandırmasını ayarlayın.
▷ Value Editor'ündeki ayarları yapılandırın (aşağıya bakın).
▷ Yapılandırmayı File > Save as Start-Config. yoluyla kaydedin.
▷ Sürücüyü Tools > Reset Driver yoluyla yeniden başlatın.
Sistem Topraklamasını (GND) Bağlama
|
Önemli
|
Farklı topraklama nedeniyle cihazda hasar
▷ Tüm bağlantıları aynı sistem toprağına yönlendirin. ▷ Harici voltaj girişlerini veya çıkışlarını farklı topraklama ile dışarıdan bağlayın. |
RevPi genişletme modülüne bağlanan 28 pinli konnektördeki tüm giriş ve çıkışlar için bir sistem toprak bağlantısı mevcuttur. Tüm giriş ve çıkışlar, referans potansiyeli olarak ortak bir sistem topraklamasına başvurur.
▷ Sistem toprağını ve düşük empedanslı harici voltaj girişinden (örneğin bir kontrol cihazının) gelen toprağı bağlayın.
Analog Girişler #
RevPi MIO, yakınlık veya seviye sensörleri gibi analog çıkışlı sensörleri bağlamak için 8 analog voltaj girişi içerir. Giriş başına maksimum ortak mod voltajı 0 ile 10 V arasında olabilir. Girişler, 0,76 V'luk bir tampona sahip bir ek yüke sahiptir. 10,76 V'un üzerindeki ölçümler engellenir.
Girişler iki fonksiyon modunda kullanılabilir:
-
analogInput: Gerilim ölçümü için girişi kullanın.
-
LogicLevelInput: Seviye algılama için girişi kullanın. Anahtarlama eşiği 0 - 10 V arasında ayarlanabilir.
Pinout'a dikkat edin Pinout.
INP Input
| İsim | Değer | Fonksiyon |
|---|---|---|
AnalogInputMode_1 … 8 |
analogInput: voltaj ölçümü için |
Girişler için fonksiyon modunu ayarlayın. |
AnalogInputLogicLevel_1 … 8 |
0: Anahtarlama eşiği aşılmadı. |
Anahtarlama eşiğinin aşılıp aşılmadığını gösterir. |
AnalogInput 1 … 8 |
Logic 0 … 10 000 |
Girişteki voltaj (mV). |
InputLogicLevelVoltage_1 … 8 |
0 … 10 000 |
Seviye algılama için anahtarlama eşiğini ayarlayın. |
FilterWindowSize |
1 … 255 |
Hareketli ortalama filtresinin filtre genişliğinin ayarlanması. |
Hareketli Ortalama Filtresi
AD dönüştürücünün doğruluğunu artırmak için sinyal aşırı örnekleme yöntemiyle örneklenir. Analog girişler 15 bit çözünürlükle örneklenir ve işlem görüntüsünde milivolt değeri (0 … 10 000) olarak bulunur.
Sinyal gürültüden çok fazla etkileniyorsa, analog girişler için hareketli ortalama filtresi ayarlanabilir. Bu filtre, ölçüm gürültüsü gibi tüm bozucu değerlerin sensör sinyalinden filtrelenmesini sağlar.
Hareketli ortalama filtresi kullanıldığında, tespit edilebilecek maksimum frekans azalır ve bunun sonucunda sinyalin bant genişliği azalır.
Analog Çıkışlar #
RevPi MIO, örneğin hız kontrolü için frekans dönüştürücüler gibi aktüatörleri bağlamak için 8 analog çıkışa sahiptir.
Çıkışlar iki fonksiyon modunda kullanılabilir:
-
analogOutput: Çıkışlar 0 - 10 V arasında voltaj sağlar.
-
LogicLevelOutput: Çıkışlar sabit, önceden yapılandırılmış bir voltaj sağlar. Dijital çıkışlar gibi kullanılabilirler. Mantık seviyesi 10 V'a kadar ayarlanabilir.
Pinout'a dikkat edin Pinout.
|
Önemli
|
Analog çıkışlara voltaj girişi nedeniyle cihazda hasar
▷ Pinlerin doğru şekilde bağlandığından emin olun.. |
OUT Çıkış Değerleri
| İsim | Değer | Fonksiyon |
|---|---|---|
AnalogOutputMode_1 … 8 |
analogOutput: Analog çıkış olarak kullanılır. |
Çıkışlar için fonksiyon modunu ayarlayın. |
analogOutput 1 … 8 |
0 … 10 000 |
Çıkış için voltajı mV olarak ayarlayın. |
OutputLogicLevelVoltage 1 … 8 |
0 … 10 000 |
LogicLevel fonksiyon modu için sabit çıkış voltajını mV olarak ayarlayın. OutputLogicLevelVoltage'ın çıkış olabilmesi için analogOutput'un 0'dan farklı olması gerekir. |
AnalogOutputLogicLevel_1 |
0: low |
LogicLevel fonksiyon modu için çıkışları yüksek veya düşük olarak ayarlayın. |
Dijital Girişler ve Çıkışlar #
RevPi MIO'nun hem giriş hem de çıkış olarak kullanılabilen 4 adet dijital bağlantısı vardır.
Pinout'a dikkat edin Pinout.
Dijital giriş ve çıkışları aşağıdaki altı çalışma modundan birinde kullanabilirsiniz.
-
PWM ölçümü
-
Darbe ölçümleri
-
Seviye tespiti
-
PWM çıkışı
-
Darbe çıkışı
-
Seviye çıkışı
|
Not
|
Analog girişi dijital giriş olarak yapılandırdıysanız, bu girişi yalnızca eşik değerini algılamak için kullanabilirsiniz. |
PWM Ölçümü için Dijital Giriş Kullanımı
Frekans ve görev döngüsü PWM çalışma modunda ölçülür. Frekans Hz cinsinden, görev döngüsü ise bir ondalık basamaklı yüzde cinsinden çıkış olarak verilir (0999 → 0 … %100,0).
10 saniyeden uzun süre kenar algılanmazsa, Görev Döngüsü ve Frekans için 0 (Kenar Algılanmadı) değeri girilir. Aşağıdaki örnekte, PWM ölçümleri için kullanılacak ilk dijital bağlantıyı yapılandıracağız. Bunu yapmak için PiCtory'deki Value Editor aşağıdaki değerleri ayarlamanız gerekecektir:
IO_Mode_1 = PWM Girişi
PWM Dutycycle_1 = Görev döngüsünü buradan ayarlayın.
❯ Fpwm/PulseCount_1 alanında cihaza gelen değeri okuyabilirsiniz.
Darbe Ölçümü için Dijital Giriş Kullanımı
65535 ms uzunluğa kadar darbe ölçümleri mümkündür. İletilen ölçüm her zaman son tam darbeden itibaren yapılır.
Fiziksel darbe süresi de ölçülür ve darbeler sayılır. Her darbe algılandığında (yükselen kenar) PulseLength_x periyodu başlatılır.
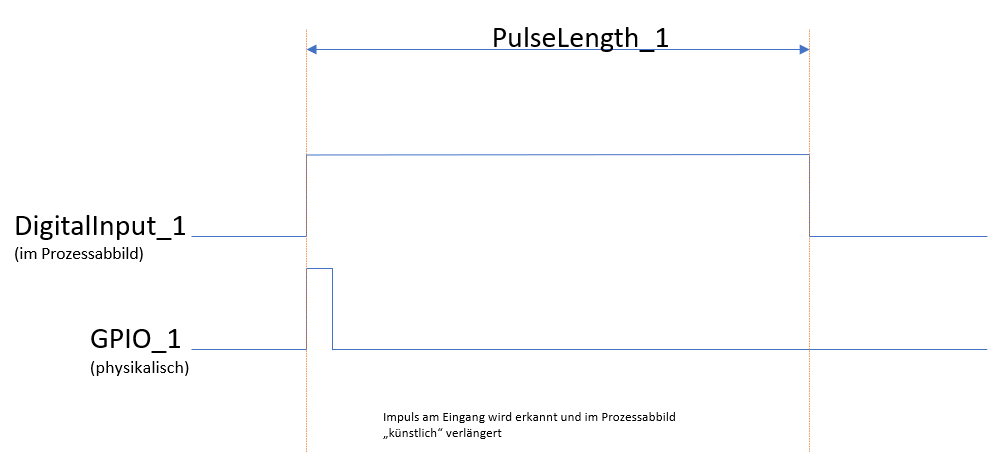
Aşağıdaki örnekte, nabız ölçümleri için kullanılacak ilk dijital bağlantıyı yapılandıracağız. Bunu yapmak için PiCtory'deki Value Editor 'de aşağıdaki değerleri ayarlamanız gerekecektir:
IO_Mode = PulseIn
❯ DutyCycle_PulseLength_1 alanında ölçülen darbe uzunluğunu milisaniye cinsinden okuyabilirsiniz.
❯ Fpwm_PulseCount_1 alanında kayıtlı darbe sayısını görebilirsiniz.
Seviye Algılama için Dijital Giriş Kullanımı
Aşağıdaki örnekte, seviye tespiti için kullanılacak ilk dijital bağlantıyı yapılandıracağız. Bunu yapmak için PiCtory'deki Value Editor 'de aşağıdaki değerleri ayarlamanız gerekecektir:
IO_Mode_1 = Giriş
❯ DigitalInput_1 alanında girdide bulunan seviyeyi okuyabilirsiniz.
PWM Çıkışı için Dijital Çıkış Kullanımı
Dört çıkış, 3 bağımsız zamanlayıcıya bölünmüştür. GPO1 ve GPO2 bir zamanlayıcıyı paylaşır; GPO3 ve GPO4'ün her birinin kendi zamanlayıcısı vardır. Sonuç olarak, 3 frekans ayarlanabilir. Değişiklikleri uygulamak için PiCtory'de PWM frekansını önceden yapılandırmanız ve sürücüyü yeniden başlatmanız gerekecektir. Her GPO için görev döngüsünü (bir ondalık basamaklı yüzde olarak) ayrı ayrı (00.0) ayarlayabilirsiniz.
Olası frekanslar f=(2*fp)/(1000*(x+1)) formülünü takip eder. Burada fp, GPO1&2 için 30 MHz, GPO3&4 için 60 MHz'dir.
Bu, 60 kHz (GPO1&2) ve 120 kHz (GPO3&4) maksimum frekanslarla sonuçlanır. x_max=65535 olduğunda, minimum frekanslar 1 Hz (GPO1&2) ve 2 Hz (GPO3&4) olur. Aşağıdaki örnekte, PWM çıkışı için kullanılacak ilk dijital bağlantıyı yapılandıracağız. Bunu yapmak için PiCtory'deki Value Editor 'de aşağıdaki değerleri ayarlamanız gerekecektir:
IO_Mode_1 = Çıkış PWM.
FpwmOut_12 = PWM sinyalinizin frekansını buradan ayarlayın.
PWM Dutycycle_1 = Görev döngüsünü buradan ayarlayın.
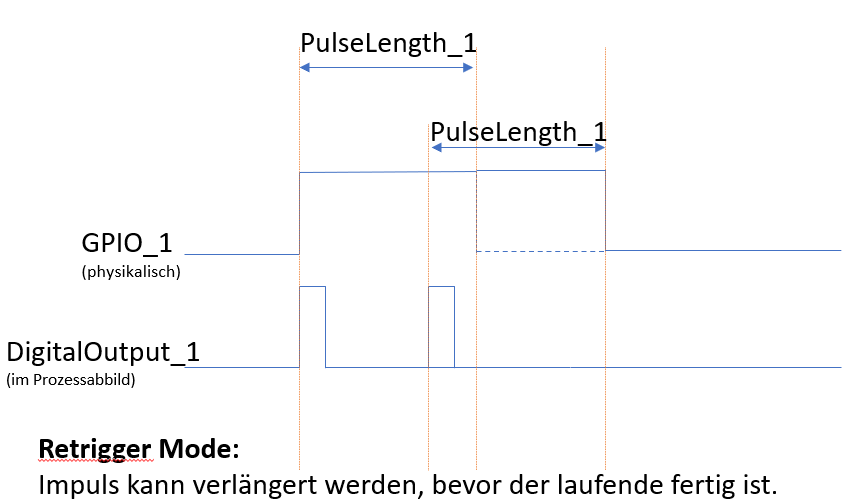
Darbe Çıkışı için Dijital Çıkış Kullanımı
Her GPO üzerinde 1 ms ile 65535 ms arasında uzunlukta bir darbe üretebilirsiniz.
Darbe, tekrar tetikleme modunda bir kez veya düzenli olarak üretilebilir.
Tek seferlik darbe:
DigitalOutput_1 değeri (işlem görüntüsünde) 1 olarak ayarlanırsa, yapılandırılmış uzunluktaki Pulselength_1 darbesi başlatılır. Bir sonraki darbe, yalnızca geçerli darbe tamamlandıktan sonra başlatılabilir.
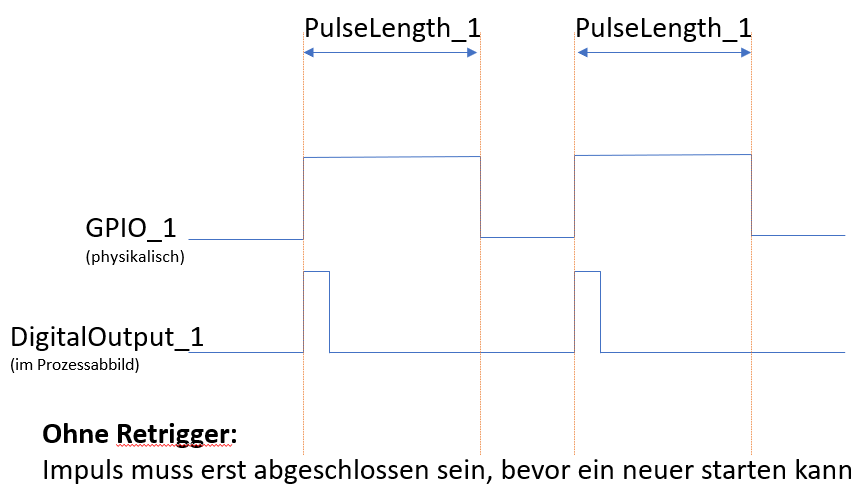
Yeniden Tetikleme Modu: DigitalOutput_1 değeri (işlem görüntüsünde) 1 olarak ayarlanırsa, yapılandırılmış uzunluktaki Pulselength_1'e sahip bir darbe başlatılır. Mevcut darbeler yeniden tetikleme modunda yeniden başlatılabilir.
|
Not
|
Yeni bir darbe başlatılmadan önce, DigitalOutput_x değeri en az bir PiBridge döngüsü boyunca 0 olmalıdır. |
Aşağıdaki örnekte, darbeyi çıkarmak için kullanılacak ilk dijital bağlantıyı yapılandıracağız. Bunu yapmak için PiCtory'deki Value Editor 'de aşağıdaki değerleri ayarlamanız gerekecektir:
IO_Mode_1 = Çıkış Darbesi
PulseMode = 1, yeniden tetikleme modunu etkinleştirmek için.
Dutycycle_Pulselength_1 = Bağlantı için darbe uzunluğunu buradan ayarlayın.
DigitalOutput_1 = 1, darbeyi başlatmak için.
|
Not
|
Yeni bir darbe başlatmadan önce, DigitalOutput_1 alanı en az bir PiBridge döngüsü boyunca 0 olarak ayarlanmalıdır. |
Seviye Çıkışı için Dijital Çıkış Kullanımı
Aşağıdaki örnekte, seviyeyi çıkış olarak kullanmak için ilk dijital bağlantıyı yapılandıracağız. Bunu yapmak için PiCtory'deki Value Editor 'de aşağıdaki değerleri ayarlamanız gerekecektir:
IO_Mode_1 = Çıkış
DigitalOutput_1 = Burada dijital çıkışı düşük (0) veya yüksek (1) olarak ayarlayabilirsiniz.
PiCtory'deki Dijital Girişler ve Çıkışlar için Ayar Değerlerinin Listesi
| PiCtory ayarı | Değerler | Fonksiyon |
|---|---|---|
DigitalInput_1 … 5 |
0: düşük |
Değer, girişte hangi seviyenin bulunduğunu gösterir. |
Dutycycle_Pulselength_1 … 4 |
0 … 65535 |
Bu değer, ayarlanan moda bağlı olarak ölçülen görev döngüsünü veya ölçülen darbe uzunluğunu gösterir. |
Fpwm/PulseCount_1 … 4 |
0 … 2000 |
Bu değer, ayarlanan moda bağlı olarak ölçülen frekansı veya kayıtlı darbeleri gösterir. |
DigitalOutput_1 … 4 |
0: düşük |
Burada bireysel dijital çıkışları yüksek veya düşük olarak ayarlayabilirsiniz. |
PWM Dutycycle_1 … 4 |
0 … 999 |
Burada, her bir dijital çıkış için görev döngüsünü ayarlayabilirsiniz. Görev döngüsü, periyodik bir darbe dizisi için darbe süresi ile periyot süresi arasındaki oranı gösterir. |
Kodlayıcı Modu |
0 = Kodlayıcı yok |
Burada değeri 1 olarak ayarlarsanız, GPIO3 ve GPIO4'ü dörtlü kodlayıcı girişi olarak kullanabilirsiniz. GPIO1 ve GPIO2 tüm modlarda çıkış olarak veya giriş (PWM yok, darbe yok) olarak kullanılmaya devam edebilir. |
IO_Mode_1 … 4 |
0 = Input |
Burada ilgili dijital giriş veya çıkış için çalışma modunu tanımlayabilirsiniz. |
PulseMode |
0 = Single |
Burada yeniden tetikleme modunu aktif hale getirebilirsiniz. |
FPWMOUT_12, 3,4 |
0 … 65535 |
12 = Dijital çıkışlar 1 ve 2 için PWM frekansı. Bu iki bağlantı her zaman aynı PWM frekansını paylaşır. Bağlantılar 3 ve 4 ayrı ayrı yapılandırılabilir. |
PulseLength_1 … 4 |
0 … 65535 |
İlgili dijital çıkıştaki darbe uzunluğu. |