Ürün Açıklaması #
RevPi Connect 5, Raspberry Pi Compute Module 5 tabanlı IIoT ve otomasyon projeleri için 24 V endüstriyel bir PC'dir. RevPi, Revolution Pi ürün ailesinin temel bir modülüdür. Revolution Pi ailesindeki tüm cihazlar EN 61131-2 standardına uygun olarak geliştirilmiştir.
Bileşenler #

| Pozisyon | Bileşen | Uygulama |
|---|---|---|
1 |
X2 RS485[1] |
|
X2 CAN[1] |
||
2 |
6 × durum LED'i |
|
3 |
2 × RJ45 Ethernet |
|
4 |
2 × USB A 3.2 Gen 1 |
|
5 |
RP-SMA[1] |
|
6 |
USB-C |
|
7 |
X3 CAN[1] |
|
8 |
X4 PWR |
|
9 |
2 × kilitleme klipsi |
|
10 |
Havalandırma Yuvaları |
|
11 |
2 × PiBridge |
|
12 |
X1 HDMI |
Compatible RevPi Image
-
RevPi Bookworm Image
Bakınız RevPi Images.
Varyantlar #
| Ürün no: | RAM | eMMC Memory | WLAN BT | RS485 | CAN |
|---|---|---|---|---|---|
100412 |
4 GB |
32 GB |
- |
× |
- |
100413 |
4 GB |
32 GB |
× |
× |
- |
100414 |
4 GB |
32 GB |
- |
× |
1 × |
100415 |
4 GB |
32 GB |
× |
× |
1 × |
100416 |
8 GB |
32 GB |
- |
× |
- |
100417 |
8 GB |
32 GB |
× |
× |
- |
100418 |
8 GB |
32 GB |
- |
× |
1 × |
100419 |
8 GB |
32 GB |
× |
× |
1 × |
100420 |
8 GB |
32 GB |
× |
- |
2 × |
Genişletme Modülleri #
RevPi Connect 5 temel modülü, bir Revolution Pi sistemi oluşturmak için 10 adede kadar genişletme modülüyle genişletilebilir:
| Sol taraf | Temel Modül | Sağ taraf |
|---|---|---|
|
5 × RevPi I/O modülü, |
RevPi Connect 5 |
5 × RevPi I/O modülü, |
Uyumlu RevPi I/O Modülleri #
Uyumlu RevPi Ağ Geçitleri #
RevPi Ağ Geçitleri yalnızca PiBridge fiş konnektörü aracılığıyla sistemin en sağına veya en soluna bağlanabilir.
-
RevPi Gate PROFINET
-
RevPi Gate EtherNet/IP
-
RevPi Gate EtherCAT
-
RevPi Gate PROFIBUS
Bakınız RevPi Ağ Geçitleri
Teslimat Kapsamı #
Teslimat kapsamı şunları içerir:
-
RevPi Connect 5 (temel modül)
-
X2 konnektörü RS485 veya CAN, Varyantlara bakın
-
X3 konnektörü CAN, Varyantlara bakın
-
X4 konnektör PWR
-
PiBridge için 2 × kör tapa
-
Product insert
Montaj ve Bağlantı #
RevPi, bir kontrol kabininde kullanılmak üzere geliştirilmiştir. Amaçlanan Kullanım ve tüm Güvenlik Talimatları'na uyun.
|
Uyarı
|
Elektrik çarpması nedeniyle hayati tehlike
230 V şebeke gerilimine sahip şalt dolabındaki cihazlar üzerinde çalışılması durumunda ölümcül elektrik çarpması riski vardır. ▷ Şalt dolabındaki işlemler yalnızca kalifiye elektrikçiler tarafından yapılmalıdır. ▷ Şalt dolabında herhangi bir işlem yapmadan önce, güç kaynağını uygun şekilde kapatın. |
Kurulum ve bağlantıyı aşağıdaki sırayla gerçekleştirin:
-
RevPi temel modülünü ve tüm genişletme modüllerini bir DIN Rayına monte edin.
-
Tüm genişletme modüllerini PiBridge fiş konnektörü aracılığıyla bağlayın.
-
Sensörler ve aktüatörler gibi diğer tüm cihazları bağlayın. Bunun için kullanabileceğiniz arayüzleri Bileşenler bölümünde bulabilirsiniz.
-
RevPi'yi masaüstü modunda çalıştırmak istiyorsanız bir monitör ve klavye bağlayın. Ağ bağlantısı üzerinden RevPi'ye erişebiliyorsanız bu gerekli değildir.
-
Son adım olarak güç kaynağını bağlayın
Cihaza Erişim #
RevPi'ye iki adımda erişilir:
RevPi internete bağlandığında tüm mevcut güncellemeleri yükleyin; böylece sistem her zaman güvenlikle ilgili özelliklerle güncel kalır.
Alternatif olarak, ağ olmadan erişim mümkündür, bakınız Masaüstü Modunu Ayarlama.
Ayrıca bakınız:
Yapılandırma #
RevPi iki adımda yapılandırılır:
-
FRevPi Bookworm Image (10/2024)'den sonraki RevPi cihazlarının temel yapılandırması Cockpit web uygulaması aracılığıyla gerçekleştirilir:
-
Ağ yapılandırması, kullanıcı yönetimi, durum ve kayıt görünümleri bir tarayıcı üzerinden yönetilebilir.
-
Standart sunucu yapılandırmasına ek olarak, Revolution Pi ve Node-RED eklentileri de mevcuttur. Bunlar, RevPi temel modülünüzü yapılandırmanıza ve yüklü hizmetleri kolayca etkinleştirmenize veya devre dışı bırakmanıza olanak tanır.
-
-
Bir Revolution Pi sisteminin modül yapılandırması, yani genişletme modüllerine sahip bir RevPi temel modülü, PiCtory uygulaması aracılığıyla veya gerekirse doğrudan geliştirme ortamında, örneğin CODESYS aracılığıyla gerçekleştirilir.
|
Not
|
CODESYS ve PiCtory yapılandırma için paralel olarak kullanılamaz. PiCtory üzerinden mevcut bir yapılandırma, CODESYS üzerinden bir yapılandırma ile üzerine yazılacaktır. Sanal aygıtlar OPC UA Sunucusu ve MQTT İstemcisi yalnızca PiCtory aracılığıyla kullanılabilir. |
Parametrelendirme #
Aşağıdaki parametreler, girişler (INP) ve çıkışlar (OUT) yapılandırılabilir:
RevPiStatus (INP) #
PiControl sürücüsünün farklı durumlarını temsil etmek için bitleri kullanır.
| Bit | Fonksiyon |
|---|---|
0 |
piControl sürücüsü çalışıyor. |
1 |
En az bir bağlı I/O modülü yapılandırılmamış. |
2 |
En az bir I/O modülü yapılandırılmış ancak bağlanmamış. Bir RevPi Ağ Geçidi yapılandırılmışsa da bit ayarlanır. |
3 |
Bir G/Ç modülü, işlem görüntüsünde yapılandırmada belirtilenden daha fazla veya daha az bayt kaplar. |
4 |
RevPi'nin sol tarafına bir RevPi Ağ Geçidi bağlanır. |
5 |
RevPi'nin sağ tarafına bir RevPi Ağ Geçidi bağlanır. |
6 |
İlk hata sayacının RS485ErrorLimit1 sınır değerine ulaşıldı. |
RevPiIOCycle (INP) #
PiBridge iletişiminin temel modül ile genişletme modülleri arasındaki çevrim süresini milisaniye (ms) cinsinden tam sayı değeri olarak görüntüler.
RS485ErrorCnt (INP) #
RevPi G/Ç modülleriyle olan iletişimdeki hataları sayar ve sayılarını tam sayı değeri olarak çıkışa verir.
Core_Temperature (INP) #
CPU sıcaklığını santigrat derece (°C) cinsinden tam sayı değeri olarak görüntüler.
Core_Frequency (INP) #
CPU frekansını MHz/10 cinsinden gösterir, örneğin 2400 MHz = değer 240.
RS485ErrorLimit1 (OUT) and RS485ErrorLimit2 (OUT) #
RS485ErrorLimit1 ve RS485ErrorLimit2 RevPi cihazı ile I/O modülleri arasındaki iletişimde hata işleme için eşik değerleri olarak kullanılır.
Her iletişim döngüsünün sonunda, hata sayacı RS485ErrorCnt şu iki sınır değeriyle karşılaştırılır:
-
RS485ErrorLimit1: Bu değere ulaşıldığında, kern.log günlük dosyasında bir mesaj oluşturulur. piControl'ün gelecekteki sürümlerinde, PiCtory'de tanımlanan varsayılan değerler de işlem görüntüsüne yazılacaktır.
-
RS485ErrorLimit2: Hata sayacı bu değere ulaştığında piBridge iletişimi tamamen sonlandırılır.
|
Not
|
Seri arayüz RS485 dışarıya yapılan iletişim etkilenmez, yalnızca dahili piBridge veri trafiği etkilenir. |
İlgili kontrol, ilgili değerin 0 olarak ayarlanmasıyla devre dışı bırakılır. Örneğin, RS485ErrorLimit1 0 olarak ayarlanırsa, kern.log dosyasında herhangi bir uyarı mesajı oluşturulmaz.
Varsayılan değerler şunlardır:
-
RS485ErrorLimit1: 10
-
RS485ErrorLimit2: 1000
Bu değerler çoğu uygulama için hata toleransı ile sistem kararlılığı arasında iyi bir denge sunar.
RevPiLED (OUT) #
Serbestçe programlanabilen LED’ler RevPiLED üzerinden kontrol edilebilir.
| Bit | Bileşen | Durum bilgisi |
|---|---|---|
|
2:0 |
LED A1 |
000 = off |
RS485 Seri Arayüzü #
SSensörler gibi seri cihazlar, X2 konnektöründeki potansiyelsiz RS485 arayüzü aracılığıyla RevPi'ye bağlanabilir. Soket, P (pozitif) ve N (negatif) için diferansiyel veri hattı terminallerine sahiptir ve bunlar D/D- veya A/B olarak da adlandırılabilir.
X2 CAN'lı ürün çeşidi için RS485 arayüzü mevcut değildir, bkz. varyantlar.
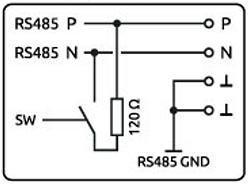
X2 Konnektörü Üzerinden RS485 Bağlantısı
▷ Tüm cihazların ilgili güç kaynaklarından çıkarıldığından emin olun.
▷ Pozitif veri hattını X2 konnektörünün P pinine bağlayın.
▷ Negatif veri hattını X2 konnektörünün N pinine bağlayın.
▷ ⫠ pinlerini RS485 topraklamasına bağlayın.
▷ Güç kaynağını bağlayın.
RS485 Arayüzünü Yapılandırma
Linux altında arayüz, aygıt sürücüsü düğümü aracılığıyla şu şekilde adreslenebilir:
-
/dev/ttyRS485-0 -
to RevPi Bullseye Image (4/2024):
/dev/ttyRS485
▷ Terminal aracılığıyla RevPi'ye giriş yapın.
▷ RS485 arayüzünün kullanılabilir olup olmadığını kontrol etmek için ls /dev/ttyRS485-0 komutunu kullanın.
Sonlandırma Direncinin Etkinleştirilmesi
✓ RS485 arayüzünün entegre 120 Ω sonlandırma direnci yeniden başlatma sonrasında kapatılır.
▷ Cockpit'i başlatın ve entegre terminali açmak için menüdeki _Terminal'e tıklayın veya terminal aracılığıyla RevPi'ye giriş yapın.
▷ GitLab'daki rs485_config komut satırı aracının Git deposuna şu komutla göz atın:
git clone https://gitlab.com/revolutionpi/rs485_config.git▷ Aracı şu komutla oluşturun:
cd rs485_config; make▷ Direnci şu komutla aktif hale getirin:
./rs485_config <SERDEV> --set-bus-term<SERDEV> ifadesini arayüzün adıyla değiştirin, örneğin /dev/ttyRS485.
▷ Direncin aktif olup olmadığını kontrol edin ve RS485 arayüzünün ayarlarını şu komutla görüntüleyin:
./rs485_config <SERDEV>❯❯ Direnç aktif hale getirilirse Bus termination: Yes çıkışı verilir.
Ayrıca bakınız:
CAN Arayüzleri #
Varyant'a bağlı olarak, RevPi'nin X3 veya X2 konnektöründe potansiyelsiz CAN arayüzleri bulunur. CAN alıcı-verici olarak CAN FD Kontrol Cihazı MCP251863 kullanılır.
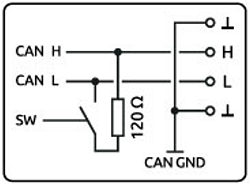
X3 veya X2 Konnektörü ile CAN Bağlantısı
▷ Tüm cihazların ilgili güç kaynaklarından çıkarıldığından emin olun.
▷ CAN H veri yolunu konnektörün H (Yüksek) pinine bağlayın.
▷ CAN L veri yolunu konnektörün L (Düşük) pinine bağlayın.
▷ ⫠ pinlerini CAN toprağına bağlayın.
▷ CGüç kaynağını bağlayın.
CAN Arayüzlerini Yapılandırma
Linux altında arayüzler şu şekilde adreslenebilir:
-
X3 CAN:
can0 -
X2 CAN:
can1
▷ Terminal aracılığıyla RevPi'ye giriş yapın.
▷ Arayüzlerin durumunu sorgulamak için aşağıdaki komutu girin:
ip link show▷ Örneğin, can0'ı etkinleştirin ve bit hızını şu komutla 500.000 baud'a (500 kbit/s) ayarlayın:
sudo ip link set can0 up type can bitrate 500000▷ 120 ohm sonlandırmayı şu komutla aktifleştirin:
sudo ip link set dev can0 type can termination 120Bu iki olası çalışma modu desteklenmektedir:
| Mixed CAN 2.0B ve FD mode CAN mode | CAN 2.0B mode |
|---|---|
Aynı veri yolunda klasik CAN mesajlarının (CAN 2.0B) ve CAN FD mesajlarının (Esnek Veri Hızı) eş zamanlı çalışması |
İletişim yalnızca klasik CAN protokolü (CAN 2.0B) üzerinden sağlanır |
64 bayta kadar kullanıcı verisi ve veri kısmı için daha yüksek bit hızları (yaklaşık 8 Mbit/s'ye kadar) |
Yalnızca 11 bit veya 29 bit kimlikli mesajlar veri hızları ve kullanıcı veri uzunlukları CAN 2.0B ile sınırlıdır. |
Karışık gereksinimlere sahip ağlarla uyumludur |
Eski kontrol üniteleriyle daha fazla birlikte çalışabilirlik ve kararlılık |
RJ45 Ethernet Arayüzleri #
RevPi, RJ45 arayüzü aracılığıyla bir ağa bağlanabilir.
RevPi'de birbirinden bağımsız iki Gbit Ethernet bağlantısı mevcuttur. Bu, RevPi'nin iki farklı ağa entegre edilebilmesini sağlar. MAC adresleri kasanın ön yüzüne basılmıştır. Linux'ta arayüzler şu şekilde adreslenebilir:
-
Socket A:
eth0 -
Socket B:
eth1
WLAN ve BT #
Prerequisites
-
WLAN arayüzlü RevPi temel modülü
-
DHCP özellikli WLAN yönlendirici
-
İsteğe bağlı: harici RP-SMA WLAN anteni
Linux altında, başka bir WLAN aygıtı kullanılmadığı takdirde WLAN arayüzüne wlan0 ile erişilebilmektedir.
Cockpit aracılığıyla WLAN'ı etkinleştirme (RevPi Bookworm Image'dan beri (10/2024))
Bakınız Cockpit.
nmtui üzerinden WLAN Bağlantısını Kurma
WLAN bağlantısı, NetworkManager nmtui aracılığıyla kurulur. NetworkManager, Linux altında ağ bağlantılarını yönetmek için kullanılan terminal tabanlı bir kullanıcı arayüzüdür.
▷ Cockpit'i başlatın.
▷ Entegre terminali açmak için menüde Terminal'i seçin.
▷ nmtui'yi şu komutla başlatın
sudo nmtui❯ Nmtui kullanıcı arayüzü açılır.
Nmtui içerisinde gezinmek için ok ve ENTER tuşlarını kullanın.
▷ Edit a connection'ı seçin.
▷ Uygun Wi-Fi ağını (Wi-Fi) seçin.
▷ Password bölümüne WLAN şifresini girin ve gerekirse diğer WLAN ayarlarını yapılandırın.
▷ Ayarları OK ile kaydedin ve Back ile ana ekrana dönün.
▷ Activate a connection'ı seçin.
▷ WLAN ağını (Wi-Fi) seçin ve ENTER tuşuyla bağlantıyı etkinleştirin.
❯ Connecting … durum mesajı görüntülenir.
❯ WLAN bağlantısı kuruldu.
▷ Gerekirse, bağlantıyı kontrol etmek için Cockpit menüsünde Networking'i seçin.
BT Arayüzü
WLAN arayüzünde olduğu gibi aynı SMA soketi üzerinden standart 5.0 BT arayüzü de mevcuttur.
Bakınız Cockpit.
Ayrıca bakınız:
USB Arayüzleri #
RevPi'de iki adet USB A 3.2 Gen 1 arayüzü bulunur. USB arayüzü başına maksimum çıkış akımı 900 mA'dir ve bu akım yalnızca RevPi'ye 24 V DC -%15 / %20 voltaj verilmesi durumunda garanti edilir.
Aşırı yüklenme durumunda ilgili USB arayüzünden güç kesilir.
Tarih ve Saat / Gerçek Zamanlı Saat (RTC) #
RevPi, Gerçek Zamanlı Saat NPX PCF2131 ile donatılmıştır. RevPi'ye herhangi bir güç kaynağı bağlı değilse, RTC yedek bir pil aracılığıyla güç alır. Lityum pilin kullanım ömrü yaklaşık 10 yıldır.
Sistem saati ve RTC systemd-timesyncd servisi aracılığıyla bir NTP sunucusuyla senkronize edilir. Senkronizasyon, örneğin Cockpit'te devre dışı bırakılabilir; bu durumda sistem saati RTC tarafından ayarlanır.
Sistem Saatini Yapılandırma
timedatectl komut satırı aracı, geçerli sistem saatini, RTC'yi ve yapılandırılmış saat dilimini sorgulamak ve değiştirmek için kullanılabilir.
▷ Terminal aracılığıyla RevPi'ye giriş yapın.
▷ Mevcut ayarları şu komutla kontrol edin:
sudo timedatectl status▷ RTC'yi şu komutla koordineli evrensel zaman UTC'ye ayarlayın:
sudo timedatectl set-local-rtc 0▷ RTC'yi yerel saat dilimine (örneğin UTC01:00) şu komutla ayarlayın:
sudo timedatectl set-local-rtc 1▷ Kendi sistem saatinizi yapılandırmak için NTP senkronizasyonunu şu komutla devre dışı bırakın:
timedatectl set-ntp false▷ Daha sonra sistem saatini şu komutla yeniden tanımlayın:
timedatectl set-time "YYYY-MM-DD HH:MM:SS"NTP Senkronizasyonu Olmadan RTC'yi Yapılandırma
RTC, doğrudan hwclock komut satırı aracı kullanılarak ayarlanabilir. Bunun için NTP senkronizasyonu devre dışı bırakılmalıdır, aksi takdirde senkronize sistem saati ayarlanan RTC'nin üzerine tekrar yazacaktır.
▷ Terminal aracılığıyla RevPi'ye giriş yapın.
▷ NTP senkronizasyonunu şu komutla devre dışı bırakın:
timedatectl set-ntp falseAlternatif olarak, Cockpit'de Set clock from NTP server ayarıyla senkronizasyonu devre dışı bırakabilirsiniz.
▷ Mevcut ayarları şu komutla kontrol edin:
sudo hwclock▷ Sistem saatini RTC ile senkronize etmek için şu komutu kullanın:
sudo hwclock --systohc▷ RTC'yi kendi zamanına ayarlamak için şu komutu kullanın:
sudo hwclock --set --date "dd mmm yyyy HH:MM"Pil Değiştirme
Lityum pil müşteri tarafından değiştirilemez. Bu durumda lütfen bizimle iletişime geçin.
Güvenilir Platform Modülü (TPM) #
RevPi, Infineon OPTIGA™ TPM SLB 9670 Güvenilir Platform Modülü ile donatılmıştır ve TPM 2.0 gereksinimlerini karşılar.
Linux altında modüle /dev/tpm0 ile ulaşabilirsiniz.
Watchdog #
Watchdog, RevPi'yi 60 saniye sonra yeniden başlatan bir zamanlayıcıdır. Bunun olmasını önlemek için, sistem hatasız çalıştığı sürece watchdog'un düzenli olarak sıfırlanması gerekir. Uygulama sürecinin çökmesi gibi bir hata durumunda, sıfırlama yapılmaz ve watchdog RevPi'nin yeniden başlatılmasını tetikler.
RevPi'de iki bağımsız watchdog vardır. Linux'ta bir watchdog kullanmanın çeşitli yolları vardır. RevPi Images ve Raspbian Pi sistem yöneticisi systemd'yi kullanır.
Entegre Watchdog
İşlemciye entegre edilen watchdog, Linux altındaki diğer watchdog'lar gibi davranır ve şu şekilde ele alınabilir:
-
/dev/watchdog0 -
/dev/watchdog(standart watchdog olarak)
Dış Watchdog
İkinci bir watchdog RTC modülü aracılığıyla kullanılabilir ve Linux altında şu şekilde ele alınabilir:
-
/dev/watchdog1
Ayrıca bakınız: