Ürün Açıklaması #
RevPi Flat S, Raspberry Pi Compute Module 4S tabanlı IIoT ve otomasyon projeleri için modüler olmayan 24 V endüstriyel PC'dir. Düz tasarımı sayesinde RevPi Flat S, DIN EN 18012 standardına uygun olarak alt dağıtım panolarına kuruluma uygundur.
Bileşenler #
|
Not
|
RevPi Flat ve RevPi Flat S aynı yapıya sahiptir. |
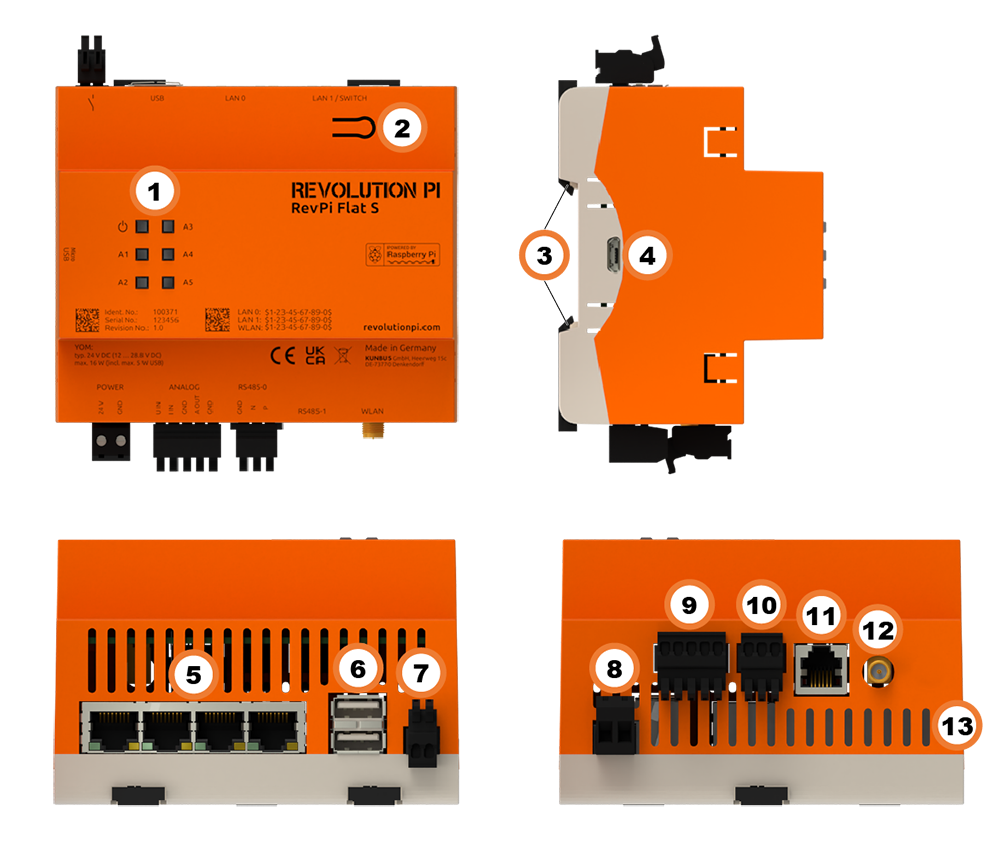
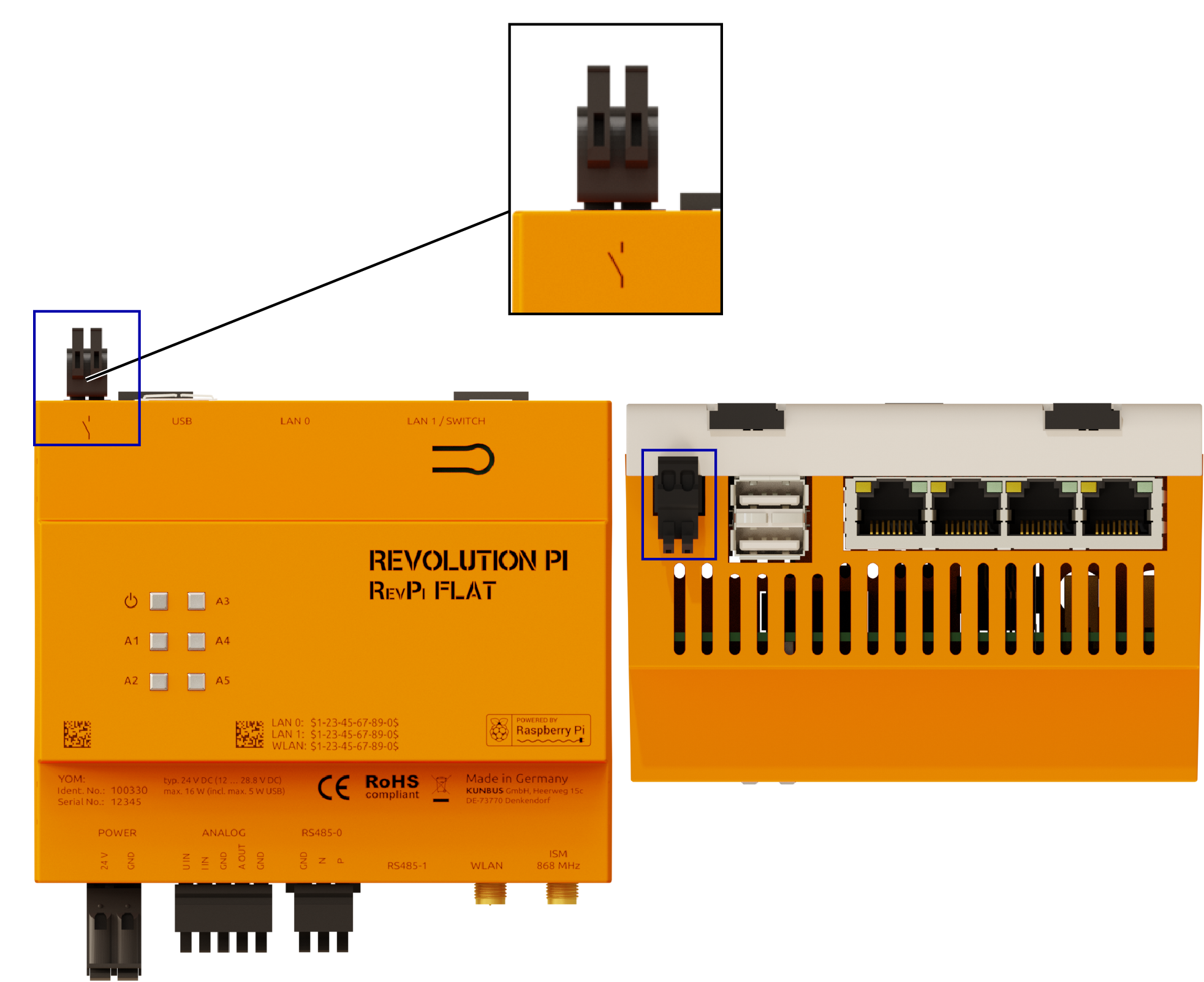
| Pozisyon | Bileşen | Uygulama |
|---|---|---|
1 |
6 × durum LED'i |
|
2 |
Buton |
|
3 |
2 × kilitleme klipsi |
|
4 |
Micro-USB[1] |
|
5 |
4 × RJ45 Ethernet |
|
6 |
2× USB A |
|
7 |
Dijital çıkış (röle kontağı) |
|
8 |
GÜÇ |
|
9 |
Analog giriş / |
|
10 |
RS485-0 |
|
11 |
RS485-1 |
|
12 |
RP-SMA soketi |
|
13 |
Ventilation Slots |
RevPi Flat S için Uyumlu RevPi Görüntüleri:
-
RevPi Bookworm Image
-
RevPi Bullseye Image
Bakınız: RevPi Images.
Varyantlar #
RevPi Flat S #
| Ürün No.: | RAM | eMMC | Micro-USB |
|---|---|---|---|
100330 |
1 GB |
8 GB |
Evet |
RevPi Flat #
| Ürün No.: | RAM | eMMC | Micro-USB |
|---|---|---|---|
100371 |
1 GB |
32 GB |
Hayır |
RevPi Flat, kurcalamaya dayanıklı bir cihaz olarak tasarlanmıştır. Bu nedenle, cihazın görüntüsünü flaş etmeniz (RevPi Flat S ürün modelinin aksine) mümkün değildir.
Sanal Cihazlar #
Sanal Cihazlar, PiCtory'deki bileşenler dahil olmak üzere RevPi Image ile birlikte teslim edilir:
Teslimat Kapsamı #
Teslimat kapsamı şunları içerir:
-
RevPi Flat S veya Rev Pi Flat (modüler olmayan temel modül)
-
2 pin fiş GÜÇ
-
5 pin fiş ANALOG
-
3 pin fiş RS-485-0
-
Röle kontağı için 2 pin fiş
-
Ek
Montaj ve Bağlantı #
RevPi, bir kontrol kabininde kullanılmak üzere geliştirilmiştir. Amaçlanan Kullanım ve tüm Güvenlik Talimatları'na uyun.
Kurulum ve bağlantıyı aşağıdaki sırayla gerçekleştirin:
- RevPi'yi bir DIN Rayına monte edin.
-
Sensörler ve aktüatörler gibi diğer tüm cihazları bağlayın. Bunun için kullanabileceğiniz arayüzleri Bileşenler bölümünde bulabilirsiniz.
-
Son adım olarak güç kaynağını bağlayın
Güç Kaynağının Bağlanması #
|
Uyarı
|
Elektrik çarpması nedeniyle hayati tehlike
230 V şebeke gerilimine sahip şalt dolabındaki cihazlar üzerinde çalışılması durumunda ölümcül elektrik çarpması riski vardır. ▷ Şalt dolabındaki işlemler yalnızca kalifiye elektrikçiler tarafından yapılmalıdır. ▷ Şalt dolabında herhangi bir işlem yapmadan önce, güç kaynağını uygun şekilde kapatın. |
|
Önemli
|
İzin verilmeyen güç kaynağı nedeniyle cihazda hasar
▷ Maksimum besleme geriliminin 28,8 V DC olmasına dikkat edin. ▷ Sadece birlikte verilen fişi ve uygun bir güç kaynağı ünitesini kullanın. ▷ Bağlantı sırasında doğru polariteye dikkat edin. ▷ Kararlı bir güç kaynağı sağlayın. |
|
Önemli
|
Gerilim beslemesi altında kurulum nedeniyle cihazda hasar
RevPi cihazı bir güç kaynağına bağlıyken, başka hiçbir cihaz bağlanmamalı veya çıkarılmamalıdır; aksi takdirde cihazlar zarar görebilir. ▷ Diğer tüm cihazlar doğru şekilde bağlanana kadar güç kaynağını bağlamayın. ▷ Bir cihazı sistemden ayırmadan önce güç kaynağını kapatın. |
|
Önemli
|
Güç kaynağından bağlantının kesilmesi nedeniyle cihaz yazılımında hasar
Cihaz çalışırken güç kaynağından ayrılırsa, eMMC belleğinin dosya sistemi bozulabilir ve cihaz artık başlatılamaz. ▷ Cihazı güç kaynağından ayırmadan önce düzgün bir şekilde kapatın. |
|
Önemli
|
Farklı topraklama nedeniyle cihazda hasar
▷ Tüm bağlantıları aynı sistem toprağına yönlendirin. ▷ Harici voltaj girişlerini veya çıkışlarını farklı topraklama ile dışarıdan bağlayın. |
Bu güç kaynağının POWER fişi üzerinden kablolanması gerekir.
Ayrıca şunlara da ihtiyacınız olacak:
✓ Bir güç kaynağı ünitesi (min. 20 W, örneğin DIN ray anahtarlama güç kaynağı, ürün no. 200003)
✓ Kablolama, kesit 0,35…2,5 mm
✓ Soyma ve sıkma pensesi
✓ Çok telli kablo kullanıyorsanız, uygun kablo ucu kovanları kullanın
✓ Küçük bir yarıklı tornavida
▷ Öncelikle bağlı cihazların güç kaynaklarını ayırın.
▷ POWER fişindeki 24 V olarak işaretli pine 10,7 - 27,8 V arasında bir güç kaynağı bağlayın.
▷ 0 V beslemesini GND olarak işaretlenmiş pine bağlayın.
Cihaza Erişim #
RevPi'ye iki adımda erişilir:
RevPi internete bağlandığında tüm mevcut güncellemeleri yükleyin; böylece sistem her zaman güvenlikle ilgili özelliklerle güncel kalır.
Ayrıca bakınız:
Yapılandırma #
RevPi iki adımda yapılandırılır:
|
Not
|
RevPi Bullseye Image (04/2024)'e kadar RevPi temel modülü RevPi Status uygulaması aracılığıyla yapılandırılır. |
-
FRevPi Bookworm Image (10/2024)'den sonraki RevPi cihazlarının temel yapılandırması Cockpit web uygulaması aracılığıyla gerçekleştirilir:
-
Ağ yapılandırması, kullanıcı yönetimi, durum ve kayıt görünümleri bir tarayıcı üzerinden yönetilebilir.
-
Standart sunucu yapılandırmasına ek olarak, Revolution Pi ve Node-RED eklentileri de mevcuttur. Bunlar, RevPi temel modülünüzü yapılandırmanıza ve yüklü hizmetleri kolayca etkinleştirmenize veya devre dışı bırakmanıza olanak tanır.
-
-
Bir Revolution Pi sisteminin modül yapılandırması, yani genişletme modüllerine sahip bir RevPi temel modülü, PiCtory uygulaması aracılığıyla veya gerekirse doğrudan geliştirme ortamında, örneğin CODESYS aracılığıyla gerçekleştirilir.
|
Note
|
CODESYS ve PiCtory yapılandırma için paralel olarak kullanılamaz. PiCtory üzerinden mevcut bir yapılandırma, CODESYS üzerinden bir yapılandırma ile üzerine yazılacaktır. Sanal aygıtlar OPC UA Sunucusu ve MQTT İstemcisi yalnızca PiCtory aracılığıyla kullanılabilir. |
Parametrelendirme #
Aşağıdaki parametreler, girişler (INP), çıkışlar (OUT) ve bellek değişkenleri (MEM) yapılandırılabilir:
AIn (INP) #
Analog girişlerin giriş değerlerini görüntüler.
AIn_Status (INP) #
Analog girişlerin durumunu görüntüler.
AOut_Status (INP) #
Analog çıkışların durumunu görüntüler.
Core_Temperature (INP) #
CPU sıcaklığını santigrat derece (°C) cinsinden tam sayı değeri olarak görüntüler.
Core_Frequency (INP) #
CPU frekansını MHz/10 cinsinden gösterir, örneğin 2400 MHz = değer 240.
Top_Button (INP) #
Basmalı butonun giriş değerini görüntüler.
RevPiLED (INP) #
Serbestçe programlanabilen LED'ler RevPiLED aracılığıyla kontrol edilebilir.
| Bit | Bileşen | Durum bilgisi |
|---|---|---|
|
2:0 |
LED A1 |
000 = off |
AOut (OUT) #
Analog çıkış için çıkış değerini görüntüler.
DOut (OUT) #
Dijital çıkış için çıkış değerini görüntüler.
AInMode (MEM) #
Analog giriş modu:
-
Gerilim ölçümü için 0 … 10 V arası gerilim
-
Akım ölçümü için 0 … 20 mA
RS485 Seri Arayüzü #
RevPi'de iki RS485 arayüzü bulunur. Bu arayüz, Modbus gibi seri protokolleri kullanmanıza ve akıllı sayaçlar veya güneş enerjisi invertörleri gibi cihazları Revolution Pi sisteminize entegre etmenize olanak tanır.
Arayüzler RS485-0 ve RS485-1 olarak etiketlenmiştir. Her iki arayüz de birbirinden ve RevPi'den galvanik olarak yalıtılmıştır.
Linux altında arayüzler şu şekilde adreslenebilir:
-
ttyAMA0( RS485-0) -
ttyS0( RS485-1)
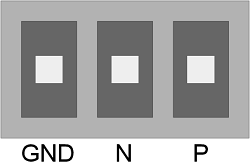
RS485-0
RS485-0, 3 kutuplu bir terminale bağlanır. Veri hatları P (pozitif) ve N (negatif) ile işaretlenmiştir. Diğer cihazlarda bu hatlar genellikle D+ ve D- veya A ve B olarak adlandırılır.
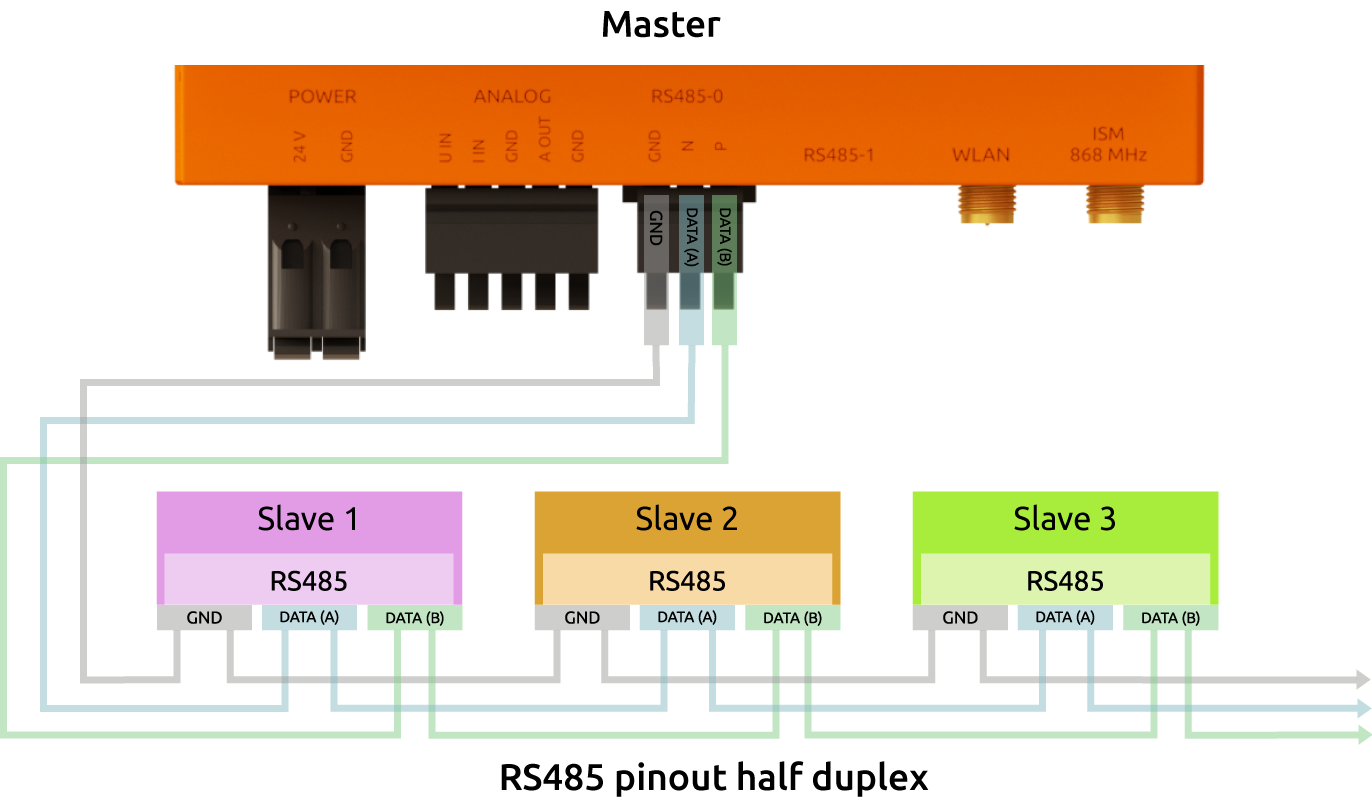
Gerçek veri iletimi için yalnızca N ve P hatları gereklidir. Daha uzun hat uzunlukları veya daha yüksek baud hızları için bükümlü çift kablo kullanmanızı öneririz.
RS485-1
RS485-1 için RJ11 soketi mevcuttur.
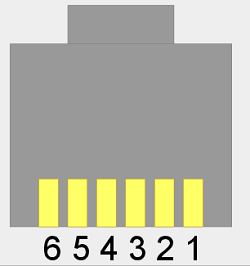
| Pin | Kablolama |
|---|---|
1 |
— |
2 |
GND |
3 |
Negative |
4 |
Positive |
5 |
GND |
6 |
— |
Referans Potansiyeli
Referans potansiyeli gerekiyorsa, ilgili RS485 veri yolunun GND elektrik devresi topraklamasını bu amaçla kullanabilirsiniz. İki RS485 sistemi birbirinden ve RevPi Flat devrelerinin geri kalanından tamamen galvanik olarak izole edildiğinden, bu GND bağlantıları da birbirinden ve RevPi Flat GND bağlantısından galvanik olarak izole edilmiştir.
Ekranlama
30 metreden uzun kablolar ve binadan çıkan kablolar ekranlanmalıdır. Ekranın EMC özelliklerini daha da iyileştirmek için, gerekirse ekran dağıtım kutusunun eşpotansiyel bağlantı rayına bağlanabilir. Bu bağlantı, bir temas kuvveti yayı ile kolayca yapılabilir.
Bit Hızları
Linux, arayüzleri /dev/ttyAMA0 ve /dev/ttyS0 karakter aygıtları aracılığıyla adresler. /dev/ttyAMA0 için 50 ila 3.000.000, /dev/ttyS0 için ise 1.200 ila 4.000.000 bit arasında bit hızları yapılandırabilirsiniz. Ancak, 230.400 bitin üzerinde zaman zaman alım hataları oluşabilir. Bunun nedeni, arayüzün bağlı olduğu Raspberry Pi'nin UART'ının yalnızca 16 baytlık bir FIFO'ya sahip olması ve DMA'yı desteklememesidir. Bit hızı ne kadar yüksekse, FIFO o kadar sık okunamamakta ve alınan veriler kaybolmaktadır. Örneğin, 460.800 bitte alınan her 50 MByte için 1-2 hata ve 921.600 bitte yaklaşık 10 hata bulunmaktadır. RevPi Flat'iniz çoğunlukla veri gönderiyor ve nadiren veri alıyorsa, daha yüksek bit hızları da kullanabilirsiniz. Aksi takdirde, 230.400 baud'dan fazla ayar yapmamanızı öneririz.
Sonlandırma Direncinin Etkinleştirilmesi
✓ RS485 arayüzünün entegre 120 Ω sonlandırma direnci yeniden başlatma sonrasında kapatılır.
▷ Cockpit 'i başlatın ve entegre terminali açmak için menüdeki _Terminal'e tıklayın veya terminal aracılığıyla RevPi'ye giriş yapın.
▷ GitLab'daki rs485_config komut satırı aracının Git deposuna şu komutla göz atın:
git clone https://gitlab.com/revolutionpi/rs485_config.git▷ Aracı şu komutla oluşturun:
cd rs485_config; make▷ Direnci şu komutla aktif hale getirin:
./rs485_config <SERDEV> --set-bus-term<SERDEV> ifadesini arayüzün adıyla değiştirin, örneğin /dev/ttyRS485.
▷ Direncin aktif olup olmadığını kontrol edin ve RS485 arayüzünün ayarlarını şu komutla görüntüleyin:
./rs485_config <SERDEV>❯❯ Direnç aktif hale getirilirse Bus termination: Yes çıkışı verilir.
RJ45 Ethernet Arayüzleri #
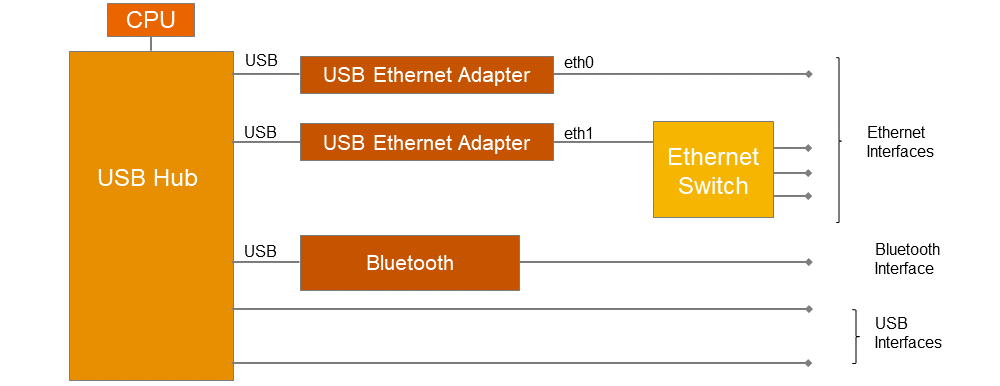
RevPi, iki veya dört bağımsız MAC adresi için bir veya üç RJ45 soketli iki adet 10/100 Ethernet arayüzüne sahiptir. Aktif otomatik anlaşma özelliğiyle yarım ve tam çift yönlü iletişimi destekler.
Her arayüz için 100 Mbit/sn aktarım hızı mevcuttur. Tüm Ethernet arayüzleri dahili USB hub'ına bağlıdır. USB arayüzleri ve Ethernet arayüzleri aynı USB bant genişliğini paylaştığından, ek USB aygıtları bağlanırsa aktarım hızı düşebilir.
LAN 0
LAN 0'ın MAC adresi, kasanın ön yüzünde basılıdır. Linux'ta arayüz eth0 ile adreslenebilir.
LAN 1 (anahtar) veya LAN 1 … LAN 3
LAN1 için üç RJ45 soketi aracılığıyla ağa en fazla üç ek cihaz bağlanabilir. Bu cihazlar, dahili USB hub'ına 1:3 anahtar aracılığıyla bağlanır. LAN 1'in MAC adresi, kasanın ön yüzünde basılıdır. Linux'ta arayüz eth1 ile adreslenebilir.
LAN 1 için üç bağlantı, DSA aracılığıyla bağımsız MAC adreslerine atanabilir. MAC adreslerinin depolama konumu /boot/config.txt 'dir.
Bu dosyaya herhangi bir adres girilmemişse veya yeni bir imaj yüklendikten sonra fabrika MAC adresleri kullanılır.
WLAN ve BT #
Ön koşullar
-
WLAN arayüzlü RevPi Connect 4, bakınız varyantlar
-
DHCP özellikli WLAN yönlendirici
-
İsteğe bağlı: harici RP-SMA WLAN anteni
Linux altında, başka bir WLAN aygıtı kullanılmadığı takdirde WLAN arayüzüne wlan0 ile erişilebilmektedir.
Cockpit aracılığıyla WLAN'ı etkinleştirme (RevPi Bookworm Image'dan beri (10/2024))
Bakınız Cockpit.
RevPi Durumu aracılığıyla PiCtory'nin etkinleştirilmesi (RevPi Bullseye Image (04/2024)'e kadar)
▷ RevPi Status'u başlatın.
▷ Etkinleştirmek için CONFIG sekmesinde Enable/Disable build-in WLAN seçeneğini seçin.
Raspi-config ile WLAN Ülke Kodunun Ayarlanması (RevPi Bullseye Image (04/2024)'e kadar)
-
Doğru ülkeyi ayarlamak, bağlantı sorunlarının önlenmesine yardımcı olur ve ağ güvenilirliğini artırır.
-
Farklı ülkeler farklı WiFi kanallarına ve sinyal güçlerine izin verir.
▷ Terminal aracılığıyla RevPi'ye giriş yapın.
▷ Raspi-config'i şu komutla açın:
sudo raspi-config▷ Localization Options menüsüne gitmek için ok tuşlarını kullanın.
▷ WLAN Country seçeneğini seçin.
▷ Ülke listesinden uygun ülkeyi seçip ENTER tuşuna basarak onaylayın.
❯ WLAN ülke kodu aktif.
nmtui üzerinden WLAN Bağlantısını Kurma
WLAN bağlantısı, NetworkManager nmtui aracılığıyla kurulur. NetworkManager, Linux altında ağ bağlantılarını yönetmek için kullanılan terminal tabanlı bir kullanıcı arayüzüdür.
▷ Cockpit'i başlatın ve entegre terminali açmak için menüdeki _Terminal'e tıklayın veya terminal aracılığıyla RevPi'ye giriş yapın.
▷ nmtui'yi şu komutla başlatın
sudo nmtui❯ Nmtui kullanıcı arayüzü açılır.
Nmtui içerisinde gezinmek için ok ve ENTER tuşlarını kullanın.
▷ Edit a connection'ı seçin.
▷ Uygun Wi-Fi ağını (Wi-Fi) seçin.
▷ Password bölümüne WLAN şifresini girin ve gerekirse diğer WLAN ayarlarını yapılandırın.
▷ Ayarları OK ile kaydedin ve Back ile ana ekrana dönün.
▷ Activate a connection'ı seçin.
▷ WLAN ağını (Wi-Fi) seçin ve ENTER tuşuyla bağlantıyı etkinleştirin.
❯ Connecting … durum mesajı görüntülenir.
❯ WLAN bağlantısı kuruldu.
▷ Gerekirse, bağlantıyı kontrol etmek için Cockpit menüsünde Networking'i seçin.
BT Arayüzünü Etkinleştirme
WLAN arayüzünde olduğu gibi aynı SMA soketi üzerinden standart 5.0 BT arayüzü de mevcuttur.
RevPi Bookworm Image (10/2024) sonrası: Bakınız Cockpit.
RevPi Bullseye Image (04/2024)'e kadar:
▷ Terminal aracılığıyla RevPi'ye giriş yapın.
▷ HCI arayüzünü şu komutla etkinleştirin:
sudo systemctl enable hciuart▷ hciuart servisini şu komutla başlatın:
sudo systemctl start hciuart▷ BT daemon'unu şu şekilde başlatın:
sudo systemctl start bluetoothAyrıca bakınız:
USB Arayüzleri #
RevPi'de iki adet USB-A arayüzü bulunur. Bu arayüz, USB sabit diskler, sörf çubukları, klavyeler veya fareler gibi USB 2.0 istemci cihazlarının bağlanmasına olanak tanır.
Bağlı cihazların güç tüketimi port başına 2,5 W'ı (500 mA @ 5 V) aşmamalıdır. Aşırı yüklenme durumunda, ilgili USB arayüzündeki güç kesilir.
USB arayüzleri, RevPi üzerindeki bir USB hub'ını iki Ethernet arayüzü ve bir Bluetooth arayüzüyle paylaşır. Bu, maksimum bant genişliğini etkileyebilir.
USB arayüzü maksimum 64 DAM tabanlı USB aygıtı için uygundur.
USB alt sistemine bağlı USB aygıtlarını aşağıdaki şekilde görüntüleyebilirsiniz:
pi@RevPi0000:~ $ lsusb -t
/: Bus 01.Port 1: Dev 1, Class=root_hub, Driver=dwc_otg/1p, 480M
|__ Port 1: Dev 2, If 0, Class=Hub, Driver=hub/5p, 480M
|__ Port 1: Dev 3, If 0, Class=Vendor Specific Class, Driver=smsc95xx, 480M`
|__ Port 4: Dev 4, If 0, Class=Vendor Specific Class, Driver=smsc95xx, 480M`
|__ Port 5: Dev 5, If 0, Class=Vendor Specific Class, Driver=ftdi_sio, 12MDijital çıkış (röle kontağı) #
Örneğin, dijital çıkışı harici cihazları açıp kapatmak için kullanabilirsiniz. Potansiyelsiz röle kontağı olarak tasarlanmıştır. Bu nedenle kontrol, pinlerin mekanik bağlantısıyla sağlanır.
Röle kontağı maksimum 30 V DC veya 24 V AC ve 2 A ile yüklenebilir.
Endüktif yüklerin anahtarlanması sırasında oluşan anahtarlama kıvılcımlarını azaltmak için röle kontağına paralel bir bastırıcı diyot bağlanır. Bu, aşınmayı azaltır. Harici bir serbest diyot veya benzeri bir ekipmana gerek yoktur.
piTest ile kontrol
Röleyi piTest üzerinden -w seçeneği ile değiştirebilirsiniz:
▷ Röleyi komutla etkinleştirin
piTest -w DOut,1▷ Röleyi komutla devre dışı bırakın
piTest -W DOut,0Doğrudan Kontrol
Röleyi işletim sistemi fonksiyonları aracılığıyla doğrudan kontrol etmek için gpio programını kullanabilirsiniz. Öncelikle, ilgili GPIO pinini (bu durumda pin 28) çıkış olarak değiştirmeniz gerekir. Ardından, çıkışı açma için 1 ve kapatma için 0 olarak ayarlayabilirsiniz. Aşağıdaki örnek, ilgili komut dizisini göstermektedir:
▷ Pin'i çıkış olarak şu komutla ayarlayın
gpio mode 28 out▷ Çıkışı komutla açın
gpio write 28 1▷ Çıktıyı komutla kapatın
gpio write 28 0Analog Girişler ve Çıkışlar #
RevPi'nin 5 pinli ANALOG konnektöründe bir adet analog giriş ve bir adet analog çıkış bulunmaktadır.
Analog giriş
Analog giriş, hem voltajı hem de akımı ölçmek için kullanılabilir.
-
U IN: Gerilim ölçümü 0 … 10 V DC
-
I IN: Akım ölçümü 0… 20 mA DC
Akım ve gerilim girişi aynı anda bağlanmamalıdır, aksi takdirde ölçüm sonucu bozulur.
Akım, dahili 240 ohm'luk bir direnç aracılığıyla orantılı bir voltaja dönüştürülür.
Bu amaçla kullanılan MCP3550-50 analog-dijital dönüştürücü (ADC) 21 bitlik yüksek kullanılabilir çözünürlük sunmakta, ancak ölçüm başına 85 milisaniye olması nedeniyle nispeten uzun bir zaman gerektirmektedir.
Arayüzlere erişmenin iki yolu vardır: Linux sysfs 'yi okuyup yazarak veya RevPi yapılandırma aracımız PiCtory ve sistemin işlem görüntüsüne erişmenizi sağlayan piTest yazılım aracını kullanarak. Aşağıda, her iki yöntemi de giriş ve çıkış için ayrı ayrı açıklıyoruz.
Linux sysfs ile Değerleri Okuma
Çıkış gerilimi 0 … 10 V:
▷ ADC'nin giriş değerini elde etmek için aşağıdaki komutu girin:
cat /sys/bus/iio/devices/*/in_voltage0*▷ Ham okunan değeri in_voltage0-voltage1_raw formülüyle ($raw * 12500) >> 20) + 12500 'e dönüştürerek voltajı mV cinsinden elde edin.
Akımı oku 0 … 20 mA:
✓ Akım I IN: portunda olmalıdır.
▷ Okunan voltajı (yukarıda görebilirsiniz) 240 ohm'luk bir dirençle bölerek mA cinsinden akımı elde edin.
piTest ile Değerleri Okuma
PiCtory'deki RevPi Flat için akım/voltaj modunu AInMode değişkenleriyle yapılandırabilirsiniz:
-
AInMode Voltajı 0-10V (standart)
-
AInMode Akımı 0- -20mA
▷ Akım veya voltaj değerini girerek kolayca okuyabilirsiniz.
piTest -r AInAnalog çıkış
Analog çıkışa frekans konvertörleri gibi aktüatörler bağlayabilirsiniz. 0 ile 10 V arasında bir voltaj çıkışı sağlayabilir.
Bu amaçla kullanılan DAC121S101 dijital-analog dönüştürücünün (DAC) çözünürlüğü 12 bittir.
Linux sysfs ile Değer Girme
▷ DAC'ye değeri girmek için aşağıdaki komutu girin:
echo 2047 | sudo tee /sys/bus/iio/devices/*/out_voltage0_raw▷ 0 ile 10 V arasında bir voltaj çıkışı elde etmek için DAC out_voltage0_raw 'a 0 ile 4095 arasında bir değer girin.
piTest ile Değer Girme
▷ AOut değişkenine analog değeri mV cinsinden girin, örneğin analog çıkış için 5000 mV:
piTest -w AOut,5000Uygulama hakkında daha fazla bilgi
Yazılım tarafında, DAC121S101 ve MCP3550-50, arayüzü sysf'de /sys/bus/iio/devices/ şeklinde uygulanan IIO modülleri gibi ele alınır.
Dönüştürücüler başarıyla kaydedildikten sonra genellikle aşağıdaki çekirdek günlüğü görünür.
pi@RevPi0000:~ $ dmesg | grep "spi.*consumer
[ 4.461004] mcp320x spi0.1: Linked as a consumer to regulator.1
[ 5.747592] ad5446 spi0.0: Linked as a consumer to regulator.2Dönüştürücüler için sysfs klasörüne /sys/bus/iio/devices/iio:deviceX. şeklinde iki alt klasör eklenir. Dönüştürücüler arasında ayrım yapmak için burada X kullanabilirsiniz. Sıra, cihazların kaydına bağlıdır ve bu nedenle sabit bir ataması yoktur. Ancak, klasörlerin içeriğine baktığınızda atama açıkça görülür. out_voltage dosyalarının bulunduğu klasör, çıkış modülüdür ve dolayısıyla DAC modülüdür. in_voltage dosyalarının bulunduğu klasör ise giriş modülüdür ve dolayısıyla ADC modülüdür.
PiTest ile yapılan yöntemde piControl bu değerleri proses görüntüsünde kalıcı olarak tutar ve piTest ile değerleri okuyup yazabilirsiniz.
Ayrıca bakınız:
Güvenilir Platform Modülü (TPM) #
RevPi, Güvenilir Platform Modülü Infineon OPTIGA™ TPM SLB 9670 ile donatılmıştır. TPM 2.0 gereksinimlerini karşılar.
Linux altında modüle /dev/tpm0 ile ulaşabilirsiniz.
Watchdog #
RevPi'nin iki bağımsız watchdog vardır. İlki, Raspberry Pi 3'te de kullanılan BCM2837 SoC'nin bir parçasıdır. İkincisi ise Maxim MAX6370 harici watchdog modülüdür.
BCM2837
BCM2837 watchdog, Linux'taki diğer watchdog'lar gibi davrandığı için tercih edilen watchdog'dır. Bu watchdog'a /dev/watchdog0 aygıt dosyasından veya /dev/watchdog BCM2837 bekçi köpeği, Linux'taki diğer bekçi köpekleri gibi davrandığı için tercih edilen bekçi köpeğidir. Bu bekçi köpeğine /dev/watchdog0 aygıt dosyasından veya /dev/watchdog aygıt dosyasından varsayılan watchdog olarak erişebilirsiniz.
MAX6370
MAX6370'e /dev/watchdog1 aygıt dosyası üzerinden erişilebilir.
Etkinleştirmek için GPIO4'ün bir kez yüksek değere ayarlanması gerekir. Ancak, artık bu GPIO üzerinden devre dışı bırakılamaz. Komut satırı üzerinden etkinleştirmek için gpiod aracını kullanabilirsiniz:
gpioset -m time -u 1000 pinctrl-bcm2835 4=1gpiod Package
gpioset komutu gpiod paketinin bir parçasıdır. Eğer yüklü değilse, kendiniz şu komutla kurabilirsiniz:
sudo apt install gpiodGPIO'yu uygulamanızdan çalıştırmak istiyorsanız,libgpiod tam size göre. Bu aynı zamanda bir Python arayüzü de sağlar.
Aşağıdaki paketlere ihtiyacınız olacak:
-
libgpiod‑dev -
libgpiod2 -
python3‑libgpiod
MAX6370'in zaman aşımı süresi 60 saniye olarak sabitlenmiştir ve değiştirilemez.
Watchdogs MAX6370 etkinleştirildikten sonra, yalnızca güç kaynağının bağlantısı kesilerek devre dışı bırakılabilir. Yeniden başlatma, watchdog'u devre dışı bırakmaz. Bu, watchdog etkinken yeniden başlatmanın 60 saniyeden uzun sürmemesi gerektiği anlamına gelir, aksi takdirde donanım sıfırlanır.
Linux altında Watchdog
Linux'ta bir watchdog kullanmanın birkaç yolu vardır. RevPi imajı ve Raspbian, systemd 'ye dayanır. Bu nedenle, watchdog kullanmanın tercih edilen yöntemi de budur. systemd bir donanım watchdog tetiklemek için kullanılabilir. Watchdog tarafından izlenecek uygulamalar daha sonra systemd tarafından izlenir. Bu, birden fazla uygulamanın izlenebilmesi avantajına sahiptir. Sonuç olarak, tüm sistemin yeniden başlatılması gerekmez, yalnızca tek bir uygulamanın yeniden başlatılması yeterlidir.
Ayrıca bakınız:
Serbestçe yapılandırılabilir basmalı buton #
RevPi, serbestçe yapılandırılabilen bir düğmeye sahiptir. Düğmenin giriş değeri GPIO13 aracılığıyla değerlendirilebilir ve ardından belirli eylemler için (örneğin, RevPi'nin kontrollü olarak kapatılması) kullanılabilir.
PiCtory Value Editor'de basmalı butonun giriş değeri görüntülenen Top_Button altına girilir.
Yazılım tarafından klavye girişiyle aynı şekilde alınabilir. KEY_UNKNOWN tuş kodu kullanılır (değer 240'a karşılık gelir).