Ürün Açıklaması #
RevPi Connect 4, Raspberry Pi Compute Module 4 tabanlı IIoT ve otomasyon projeleri için 24 V endüstriyel bir PC'dir. RevPi, Revolution Pi ailesinin temel bir modülüdür. Revolution Pi ailesindeki tüm cihazlar EN 61131-2 standardına uygun olarak geliştirilmiştir.
Bileşenler #

| Pozisyon | Bileşen | Uygulama |
|---|---|---|
1 |
X2 RS485 konnektörü |
|
2 |
6 × durum LED'i |
|
3 |
2 × RJ45 Ethernet |
|
4 |
2 × USB A 3.2 Gen 1 |
|
5 |
RP-SMA[1] |
|
6 |
Micro-USB |
|
7 |
X2 konnektör |
|
8 |
X4 konnektör |
|
9 |
2 × kilitleme klipsi |
|
10 |
Havalandırma Yuvaları |
|
11 |
2 × PiBridge |
|
12 |
Micro HDMI |
Uyumlu RevPi Image'ları
-
RevPi Bookworm Image
-
RevPi Bullseye Image
Bakınız RevPi Image'ları.
Varyantlar #
| Ürün No.: | RAM | eMMC | WLAN |
|---|---|---|---|
100376 |
2 GB |
8 GB |
Hayır |
100377 |
2 GB |
8 GB |
Evet |
100378 |
4 GB |
32 GB |
Hayır |
100379 |
4 GB |
32 GB |
Evet |
100395 |
8 GB |
32 GB |
Hayır |
100380 |
8 GB |
32 GB |
Evet |
Genişletme Modülleri #
RevPi Connect 4 temel modülü, bir Revolution Pi sistemi oluşturmak için 10 adede kadar genişletme modülüyle genişletilebilir:
| Sol taraf | temel modül | Sağ taraf |
|---|---|---|
5 × RevPi I/O modülü |
RevPi Connect 4 |
5 × RevPi I/O modülü |
Uyumlu RevPi I/O Modülleri #
Teslimat Kapsamı #
Teslimat kapsamı şunları içerir:
-
RevPi Connect 4 (temel modül)
-
X4 konnektör
-
2 × X2 konnektör
-
PiBridge için 2 × kör tapa
-
Ürün eki
Montaj ve Bağlantı #
RevPi, bir kontrol kabininde kullanılmak üzere geliştirilmiştir. Amaçlanan Kullanım ve tüm Güvenlik Talimatları'na uyun.
|
Uyarı
|
Elektrik çarpması nedeniyle hayati tehlike
230 V şebeke gerilimine sahip şalt dolabındaki cihazlar üzerinde çalışılması durumunda ölümcül elektrik çarpması riski vardır. ▷ Şalt dolabındaki işlemler yalnızca kalifiye elektrikçiler tarafından yapılmalıdır. ▷ Şalt dolabında herhangi bir işlem yapmadan önce, güç kaynağını uygun şekilde kapatın. |
Kurulum ve bağlantıyı aşağıdaki sırayla gerçekleştirin:
-
RevPi temel modülünü ve tüm genişletme modüllerini bir DIN Rayına monte edin.
-
Tüm genişletme modüllerini PiBridge fiş konnektörü aracılığıyla bağlayın.
-
Sensörler ve aktüatörler gibi diğer tüm cihazları bağlayın. Bunun için kullanabileceğiniz arayüzleri Bileşenler bölümünde bulabilirsiniz.
-
RevPi'yi masaüstü modunda çalıştırmak istiyorsanız bir monitör ve klavye bağlayın. Ağ bağlantısı üzerinden RevPi'ye erişebiliyorsanız bu gerekli değildir.
-
Son adım olarak güç kaynağını bağlayın
UPS'in bağlanması #
UPS (kesintisiz güç kaynağı), bir arıza sırasında cihazların çalışmaya devam etmesini sağlar. UPS türüne bağlı olarak, aşağıdaki arızalara karşı koruma sağlayabilir:
-
Elektrik kesintisi
-
Aşırı voltaj
-
Düşük voltaj
-
Frekans değişiklikleri
-
Harmonikler
RevPi'de bir dijital giriş bulunur ve bu girişe bir UPS'in durum çıkışı bağlanabilir.
▷ UPS'inizin RevPi'ye bağlanmaya uygun olup olmadığını kontrol edin.
▷ UPS'in durum çıkışını X2 konnektöründeki dijital girişe (pin IN ve pin ⫠) bağlayın.
▷ UPS üreticisinin kurulum şartlarını dikkate alın.
▷ UPS'i test edin.
İşlem görüntüsünde, RevPiStatus değişkeninin 6. biti, girişe 0 V veya 24 V uygulanmasına bağlı olarak 0 veya 1'dir. Uygulamanız bu biti döngüsel olarak okumalıdır. UPS bir sorun bildirirse, uygulamanız buna uygun bir önlem başlatmalıdır. Tam olarak ne yapılması gerektiği şunlara bağlıdır:
-
kullanılan pilin boyutu,
-
RevPi'nin mevcut tüketimi,
-
UPS'e ek olarak bağlanan tüm bileşenlerin akım tüketimi.
Genellikle sistem güvenli duruma getirilir ve RevPi kapatılır.
Cihaza Erişim #
RevPi'ye iki adımda erişilir:
RevPi internete bağlandığında tüm mevcut güncellemeleri yükleyin; böylece sistem her zaman güvenlikle ilgili özelliklerle güncel kalır.
Alternatif olarak, ağ olmadan erişim mümkündür, bakınız Masaüstü Modunu Ayarlama.
Ayrıca bakınız:
Yapılandırma #
RevPi iki adımda yapılandırılır:
|
Not
|
RevPi Bullseye Image (04/2024)'e kadar RevPi temel modülü RevPi Status uygulaması aracılığıyla yapılandırılır. |
-
FRevPi Bookworm Image (10/2024)'den sonraki RevPi cihazlarının temel yapılandırması Cockpit web uygulaması aracılığıyla gerçekleştirilir:
-
Ağ yapılandırması, kullanıcı yönetimi, durum ve kayıt görünümleri bir tarayıcı üzerinden yönetilebilir.
-
Standart sunucu yapılandırmasına ek olarak, Revolution Pi ve Node-RED eklentileri de mevcuttur. Bunlar, RevPi temel modülünüzü yapılandırmanıza ve yüklü hizmetleri kolayca etkinleştirmenize veya devre dışı bırakmanıza olanak tanır.
-
-
Bir Revolution Pi sisteminin modül yapılandırması, yani genişletme modüllerine sahip bir RevPi temel modülü, PiCtory uygulaması aracılığıyla veya gerekirse doğrudan geliştirme ortamında, örneğin CODESYS aracılığıyla gerçekleştirilir.
|
Not
|
CODESYS ve PiCtory yapılandırma için paralel olarak kullanılamaz. PiCtory üzerinden mevcut bir yapılandırma, CODESYS üzerinden bir yapılandırma ile üzerine yazılacaktır. Sanal aygıtlar OPC UA Sunucusu ve MQTT İstemcisi yalnızca PiCtory aracılığıyla kullanılabilir. |
Parametrelendirme #
Aşağıdaki parametreler, girişler (INP) ve çıkışlar (OUT) yapılandırılabilir:
RevPiStatus (INP) #
PiControl sürücüsünün farklı durumlarını temsil etmek için bitleri kullanır.
| Bit | Fonksiyon |
|---|---|
0 |
piControl sürücüsü çalışıyor. |
1 |
En az bir bağlı I/O modülü yapılandırılmamış. |
2 |
En az bir I/O modülü yapılandırılmış ancak bağlanmamış. Bir RevPi Ağ Geçidi yapılandırılmışsa da bit ayarlanır. |
3 |
Bir G/Ç modülü, işlem görüntüsünde yapılandırmada belirtilenden daha fazla veya daha az bayt kaplar. |
4 |
RevPi'nin sol tarafına bir RevPi Ağ Geçidi bağlanır. |
5 |
RevPi'nin sağ tarafına bir RevPi Ağ Geçidi bağlanır. |
6 |
İlk hata sayacının RS485ErrorLimit1 sınır değerine ulaşıldı. |
RevPiIOCycle (INP) #
PiBridge iletişiminin temel modül ile genişletme modülleri arasındaki çevrim süresini milisaniye (ms) cinsinden tam sayı değeri olarak görüntüler.
RS485ErrorCnt (INP) #
RevPi I/O modülleriyle olan iletişimdeki hataları sayar ve sayılarını tam sayı değeri olarak çıkışa verir.
Core_Temperature (INP) #
CPU sıcaklığını santigrat derece (°C) cinsinden tam sayı değeri olarak görüntüler.
Core_Frequency (INP) #
CPU frekansını MHz/10 cinsinden gösterir, örneğin 2400 MHz = değer 240.
RS485ErrorLimit1 (OUT) and RS485ErrorLimit2 (OUT) #
RS485ErrorLimit1 ve RS485ErrorLimit2 RevPi cihazı ile I/O modülleri arasındaki iletişimde hata işleme için eşik değerleri olarak kullanılır.
Her iletişim döngüsünün sonunda, hata sayacı RS485ErrorCnt şu iki sınır değeriyle karşılaştırılır:
-
RS485ErrorLimit1: Bu değere ulaşıldığında, kern.log günlük dosyasında bir mesaj oluşturulur. piControl'ün gelecekteki sürümlerinde, PiCtory'de tanımlanan varsayılan değerler de işlem görüntüsüne yazılacaktır.
-
RS485ErrorLimit2: Hata sayacı bu değere ulaştığında piBridge iletişimi tamamen sonlandırılır.
|
Not
|
Seri arayüz RS485 dışarıya yapılan iletişim etkilenmez, yalnızca dahili piBridge veri trafiği etkilenir. |
İlgili kontrol, ilgili değerin 0 olarak ayarlanmasıyla devre dışı bırakılır. Örneğin, RS485ErrorLimit1 0 olarak ayarlanırsa, kern.log dosyasında herhangi bir uyarı mesajı oluşturulmaz.
Varsayılan değerler şunlardır:
-
RS485ErrorLimit1: 10
-
RS485ErrorLimit2: 1000
Bu değerler çoğu uygulama için hata toleransı ile sistem kararlılığı arasında iyi bir denge sunar.
RevPiLED (OUT) #
Serbestçe programlanabilen LED’ler RevPiLED üzerinden kontrol edilebilir.
| Bit | Bileşen | Durum bilgisi |
|---|---|---|
|
2:0 |
LED A1 |
000 = off |
RevPiOutput (OUT) #
Röle kontağı RevPiOutput, bit 0 üzerinden kontrol edilir.
RS485 Seri Arayüzü #
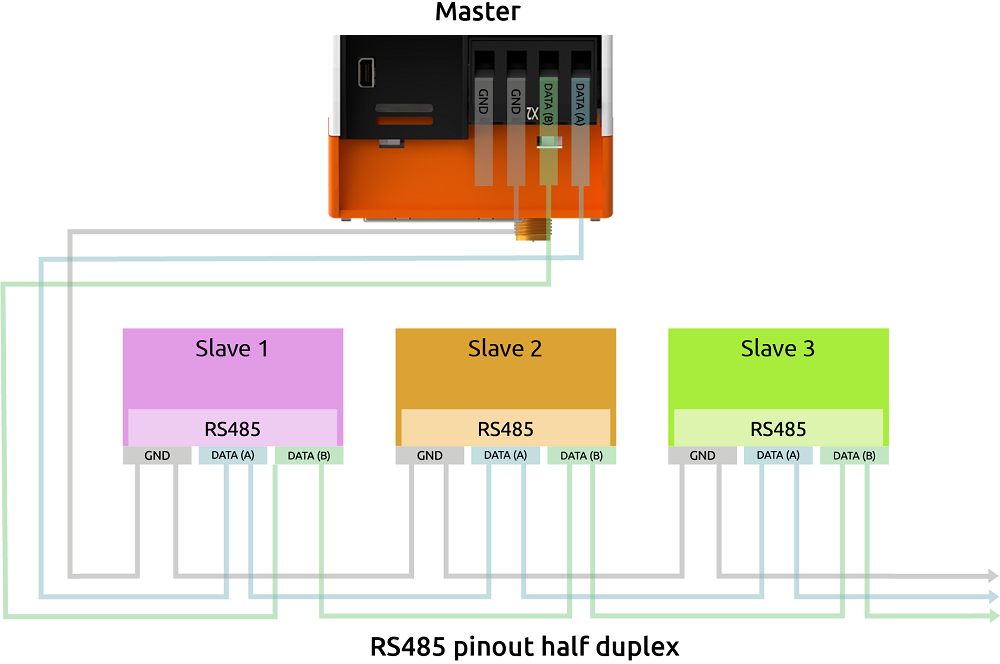
RevPi'nin üst X2 konnektöründe sensörler gibi seri cihazları bağlamak için bir RS485 arayüzü bulunur.
Soketin diferansiyel veri hattı terminalleri P/N ve referans terminalleri (dahili GND ve 1 MOhm RC şebekesi üzerinden fonksiyonel topraklama) vardır.
Linux altında arayüz, device driver node'u üzerinden /dev/ttyRS485 ile adreslenebilir.
Bu bağlantıyı en iyi şekilde nasıl kullanacağınız, proje ortamınıza bağlıdır. Üzerinde çalıştığınız ağ veya EMC yükü, bu konektörü nasıl atayacağınızı etkileyen bireysel faktörlerdir.
Bu nedenle, bireysel projeniz için en iyi çözümü size gösteremeyiz, ancak ortaya çıkabilecek sorunların bir listesini ve bunları nasıl çözebileceğinize dair ipuçlarını derledik.
RS485 tamamen diferansiyel bir hat olup normalde üçüncü bir GND hattı gerektirmez. Ancak, giriş alıcılarının (maksimum ortak mod voltajı) sınırlamaları nedeniyle, verici ve alıcı arasında potansiyel referans kullanılmadığında sinyal kalitesinde sorunlar yaşanabilir. Dahili GND'yi EMC'ye tabi bir hatta bağlamak, RevPi Connect içinde EMC sorunlarına yol açabilir.
Bu nedenle, tüm RS485 ağ katılımcıları arasında ortak bir fonksiyonel topraklama kullanmanızı öneririz. Bu, diferansiyel veri yolu sinyali için iyi ve ortak bir referans potansiyeli sağlar.
Eğer bu da işe yaramazsa RS485 konnektörünün FE terminalini bus'ın üçüncü (GND) hattına bağlayabilirsiniz.
Sinyal problemlerini GND terminali ile de çözmeyi deneyebilirsiniz.
Sonlandırma Direncinin Etkinleştirilmesi
✓ RS485 arayüzünün entegre 120 Ω sonlandırma direnci yeniden başlatma sonrasında kapatılır.
▷ Cockpit'i başlatın ve entegre terminali açmak için menüdeki _Terminal'e tıklayın veya terminal aracılığıyla RevPi'ye giriş yapın.
▷ GitLab'daki rs485_config komut satırı aracının Git deposuna şu komutla göz atın:
git clone https://gitlab.com/revolutionpi/rs485_config.git▷ Aracı şu komutla oluşturun:
cd rs485_config; make▷ Direnci şu komutla aktif hale getirin:
./rs485_config <SERDEV> --set-bus-term<SERDEV> ifadesini arayüzün adıyla değiştirin, örneğin /dev/ttyRS485.
▷ Direncin aktif olup olmadığını kontrol edin ve RS485 arayüzünün ayarlarını şu komutla görüntüleyin:
./rs485_config <SERDEV>❯❯ Direnç aktif hale getirilirse Bus termination: Yes çıkışı verilir.
RJ45 Ethernet Arayüzleri #
RevPi, RJ45 arayüzü aracılığıyla bir ağa bağlanabilir.
RevPi'de birbirinden bağımsız 10/100 Ethernet bağlantıları mevcuttur. Bu, RevPi'nin iki farklı ağa entegre edilmesini sağlar. MAC adresleri kasanın ön yüzüne basılmıştır. Linux'ta arayüzler şu şekilde adreslenebilir:
-
Socket A:
eth0 -
Socket B:
eth1
WLAN ve BT #
Ön koşullar
-
WLAN arayüzlü RevPi Connect 4, bakınız varyantlar
-
DHCP özellikli WLAN router
-
İsteğe bağlı: harici RP-SMA WLAN anteni
Linux altında, başka bir WLAN aygıtı kullanılmadığı takdirde WLAN arayüzüne wlan0 ile erişilebilmektedir.
Cockpit aracılığıyla WLAN'ı etkinleştirme (RevPi Bookworm Image'dan beri (10/2024))
Bakınız Cockpit.
RevPi Durumu aracılığıyla PiCtory'nin etkinleştirilmesi (RevPi Bullseye Image (04/2024)'e kadar)
▷ RevPi Status'u başlatın.
▷ Etkinleştirmek için CONFIG sekmesinde Enable/Disable build-in WLAN seçeneğini seçin.
Raspi-config ile WLAN Ülke Kodunun Ayarlanması (RevPi Bullseye Image (04/2024)'e kadar)
-
Doğru ülkeyi ayarlamak, bağlantı sorunlarının önlenmesine yardımcı olur ve ağ güvenilirliğini artırır.
-
Farklı ülkeler farklı WiFi kanallarına ve sinyal güçlerine izin verir.
▷ Terminal aracılığıyla RevPi'ye giriş yapın.
▷ Raspi-config'i şu komutla açın:
sudo raspi-config▷ Localization Options menüsüne gitmek için ok tuşlarını kullanın.
▷ WLAN Country seçeneğini seçin.
▷ Ülke listesinden uygun ülkeyi seçip ENTER tuşuna basarak onaylayın.
❯ WLAN ülke kodu aktif.
nmtui üzerinden WLAN Bağlantısını Kurma
WLAN bağlantısı, NetworkManager nmtui aracılığıyla kurulur. NetworkManager, Linux altında ağ bağlantılarını yönetmek için kullanılan terminal tabanlı bir kullanıcı arayüzüdür.
▷ Cockpit'i başlatın ve entegre terminali açmak için menüdeki _Terminal'e tıklayın veya terminal aracılığıyla RevPi'ye giriş yapın.
▷ nmtui'yi şu komutla başlatın
sudo nmtui❯ Nmtui kullanıcı arayüzü açılır.
Nmtui içerisinde gezinmek için ok ve ENTER tuşlarını kullanın.
▷ Edit a connection'ı seçin.
▷ Uygun Wi-Fi ağını (Wi-Fi) seçin.
▷ Password bölümüne WLAN şifresini girin ve gerekirse diğer WLAN ayarlarını yapılandırın.
▷ Ayarları OK ile kaydedin ve Back ile ana ekrana dönün.
▷ Activate a connection'ı seçin.
▷ WLAN ağını (Wi-Fi) seçin ve ENTER tuşuyla bağlantıyı etkinleştirin.
❯ Connecting … durum mesajı görüntülenir.
❯ WLAN bağlantısı kuruldu.
▷ Gerekirse, bağlantıyı kontrol etmek için Cockpit menüsünde Networking'i seçin.
BT Arayüzünü Etkinleştirme
WLAN arayüzünde olduğu gibi aynı SMA soketi üzerinden standart 5.0 BT arayüzü de mevcuttur.
RevPi Bookworm Image (10/2024) sonrası: Bakınız Cockpit.
RevPi Bullseye Image (04/2024)'e kadar:
▷ Terminal aracılığıyla RevPi'ye giriş yapın.
▷ HCI arayüzünü şu komutla etkinleştirin:
sudo systemctl enable hciuart▷ hciuart servisini şu komutla başlatın:
sudo systemctl start hciuart▷ BT daemon'unu şu şekilde başlatın:
sudo systemctl start bluetoothAyrıca bakınız:
USB Arayüzleri #
RevPi'de iki adet USB A 3.2 Gen 1 arayüzü bulunur. USB arayüzü başına maksimum çıkış akımı 800 mA'dir ve yalnızca RevPi'ye 24 V DC -%15 / %20 besleme gerilimi sağlandığında garanti edilir..
Aşırı yüklenme durumunda ilgili USB arayüzünden güç kesilir.
Röle Çıkışı #
RevPi'nin alt X2 konnektöründe röle çıkışı bulunmaktadır.
Bu röle çıkışı örneğin bağlı donanıma giden güç kaynağını kesmek için kullanılabilir.
-
Röle maksimum 30 V ve 300 mA’i anahtarlayabilir.
-
Başlatma sonrasında röle kontağı açıktır.
▷ Tüm cihazların ilgili güç kaynaklarından çıkarıldığından emin olun.
▷ Anahtarlanacak yükü X2 konnektöründeki OUT pinlerine bağlayın.
▷ Güç kaynağını bağlayın.
Röle çıkışı, proses görüntüsünde durum byte'ı RevPiOutput bit 0 aracılığıyla kontrol edilir.
Dijital Giriş #
RevPi'nin alt X2 konnektöründe +24 V giriş sinyali için dijital bir giriş bulunur.
Girişte dahili bir çekme direnci bulunmaktadır.
Dijital giriş, bir UPS'i bağlamak için kullanılabilir.
▷ Tüm cihazların ilgili güç kaynaklarından çıkarıldığından emin olun.
▷ Sinyal vericisini X2 konnektörünün IN+ ve IN- pinlerine bağlayın.
▷ Güç kaynağını bağlayın.
Güvenilir Platform Modülü (TPM) #
RevPi, Infineon OPTIGA™ TPM SLB 9670 Güvenilir Platform Modülü ile donatılmıştır ve TPM 2.0 gereksinimlerini karşılar.
Linux altında modüle /dev/tpm0 ile ulaşabilirsiniz.
Watchdog #
Watchdog, RevPi'yi 60 saniye sonra yeniden başlatan bir zamanlayıcıdır. Bunun olmasını önlemek için, sistem hatasız çalıştığı sürece watchdog'un düzenli olarak sıfırlanması gerekir. Uygulama sürecinin çökmesi gibi bir hata durumunda, sıfırlama yapılmaz ve watchdog RevPi'nin yeniden başlatılmasını tetikler.
RevPi'de iki bağımsız watchdog vardır. Linux'ta bir watchdog kullanmanın çeşitli yolları vardır. RevPi Images ve Raspbian Pi sistem yöneticisi systemd'yi kullanır.
Entegre Watchdog
İşlemciye entegre edilen watchdog, Linux altındaki diğer watchdog'lar gibi davranır ve şu şekilde ele alınabilir:
-
/dev/watchdog0 -
/dev/watchdog(standart watchdog olarak)
Dış Watchdog
İkinci bir watchdog RTC modülü aracılığıyla kullanılabilir ve Linux altında şu şekilde ele alınabilir:
-
/dev/watchdog1
Ayrıca bakınız: